Building distributed systems means confronting failure modes that are nearly impossible to reproduce in development or testing environments. How do you test for metastable failures that only emerge under specific load patterns? How do you validate that your quorum-based system actually maintains consistency during network partitions? How do you catch cross-system interaction bugs when both systems work perfectly in isolation? Integration testing, performance testing, and chaos engineering all help, but they have limitations. For the past few years, I’ve been using simulation to validate boundary conditions that are hard to test in real environments. Interactive simulators let you tweak parameters, trigger failure scenarios, and see the consequences immediately through metrics and visualizations.
In this post, I will share four simulators I’ve built to explore the failure modes and consistency challenges that are hardest to test in real systems:
Metastable Failure Simulator: Demonstrates how retry storms create self-sustaining collapse
CAP/PACELC Consistency Simulator: Shows the real tradeoffs between consistency, availability, and latency
CRDT Simulator: Explores conflict-free convergence without coordination
Cross-System Interaction (CSI) Failure Simulator: Reveals how correct systems fail through their interactions
Each simulator is built on research findings and real-world incidents. The goal isn’t just to understand these failure modes intellectually, but to develop intuition through experimentation. All simulators available at: https://github.com/bhatti/simulators.
Part 1: Metastable Failures
The Problem: When Systems Attack Themselves
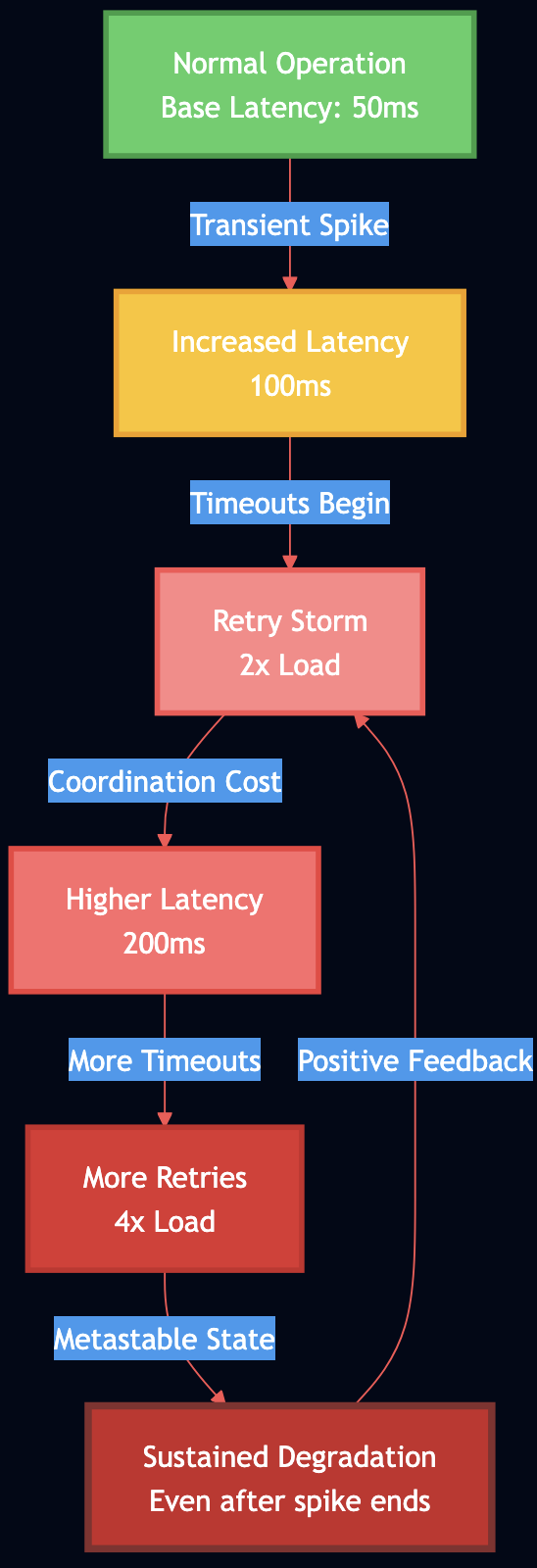
Metastable failures are particularly insidious because the initial trigger can be small and transient, but the system remains degraded long after the trigger is gone. Research in the metastable failures has shown that traditional fault tolerance mechanisms don’t protect against metastability because the failure is self-sustaining through positive feedback loops in retry logic and coordination overhead. The mechanics are deceptively simple:
A transient issue (network blip, brief CPU spike) causes some requests to slow down
Slow requests start timing out
Clients retry timed-out requests, adding more load
The system is now in a stable degraded state, even though the original trigger is gone
For example, AWS Kinesis experienced a 7+ hour outage in 2020 where a transient metadata mismatch triggered retry storms across the fleet. Even after the original issue was fixed, the retry behavior kept the system degraded. The recovery required externally rate-limiting client retries.
How the Simulator Works
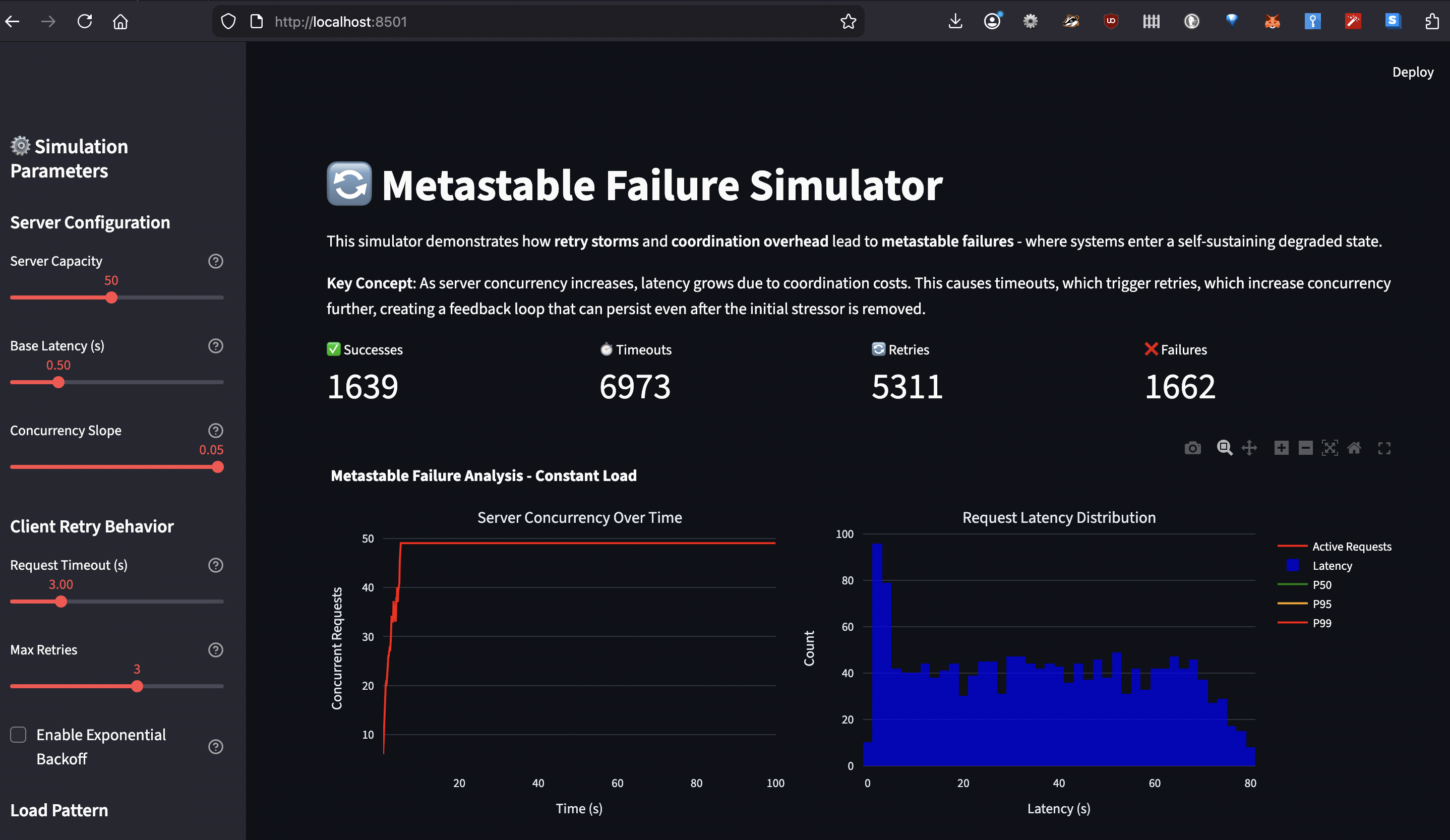
The metastable failure simulator models this feedback loop using discrete event simulation (SimPy). Here’s what it simulates:
Server Model:
Base latency: Time to process a request with no contention
Concurrency slope: Additional latency per concurrent request (coordination cost)
Capacity: Maximum concurrent requests before queueing
# Latency grows linearly with active requests
def current_latency(self):
return self.base_latency + (self.active_requests * self.concurrency_slope)
Client Model:
Timeout threshold: When to give up on a request
Max retries: How many times to retry
Backoff strategy: Exponential backoff with jitter (configurable)
Load Patterns:
Constant: Steady baseline load
Spike: Sudden increase for a duration, then back to baseline
Ramp: Gradual increase and decrease
Key Parameters to Experiment With:
Parameter
What It Tests
Typical Values
server_capacity
How many concurrent requests before queueing
20-100
base_latency
Processing time without contention
0.1-1.0s
concurrency_slope
Coordination overhead per request
0.001-0.05s
timeout
When clients give up
1-10s
max_retries
Retry attempts before failure
0-5
backoff_enabled
Whether to add jitter and delays
True/False
What You Can Learn:
Trigger a metastable failure: Set spike load high, timeout low, disable backoff ? watch P99 latency stay high after spike ends
See recovery with backoff: Same scenario but enable exponential backoff ? system recovers when spike ends
Understand the tipping point: Gradually increase concurrency slope ? observe when retry amplification begins
Test admission control: Set low server capacity ? see benefit of failing fast vs queueing
The simulator tracks success rate, retry count, timeout count, and latency percentiles over time, letting you see exactly when the system tips into metastability and whether it recovers. With this simulator you can validate various prevention strategies such as:
Exponential backoff with jitter spreads retries over time
Adaptive retry budgets limit total fleet-wide retries
Circuit breakers detect patterns and stop retry storms
Load shedding rejects requests before queues explode
Part 2: CAP and PACELC
The CAP theorem correctly states that during network partitions, you must choose between consistency and availability. However, as Daniel Abadi and others have pointed out, this only addresses partition scenarios. Most systems spend 99.99% of their time in normal operation, where the real tradeoff is between latency and consistency. This is where PACELC comes in:
If Partition happens: choose Availability or Consistency
Else (normal operation): choose Latency or Consistency
PACELC provides a more complete framework for understanding real-world distributed databases:
PA/EL Systems (DynamoDB, Cassandra, Riak):
Partition ? Choose Availability (serve stale data)
Normal ? Choose Latency (1-2ms reads from any replica)
Use when: Shopping carts, session stores, high write throughput needed
Normal ? Choose Consistency (5-100ms for quorum coordination)
Use when: Financial transactions, inventory, anything that can’t be wrong
PA/EC Systems (MongoDB):
Partition ? Choose Availability (with caveats – unreplicated writes go to rollback)
Normal ? Choose Consistency (strong reads/writes in baseline)
Use when: Mixed workloads with mostly consistent needs
PC/EL Systems (PNUTS):
Partition ? Choose Consistency
Normal ? Choose Latency (async replication)
Use when: Read-heavy with timeline consistency acceptable
Quorum Consensus: Strong Consistency with Coordination
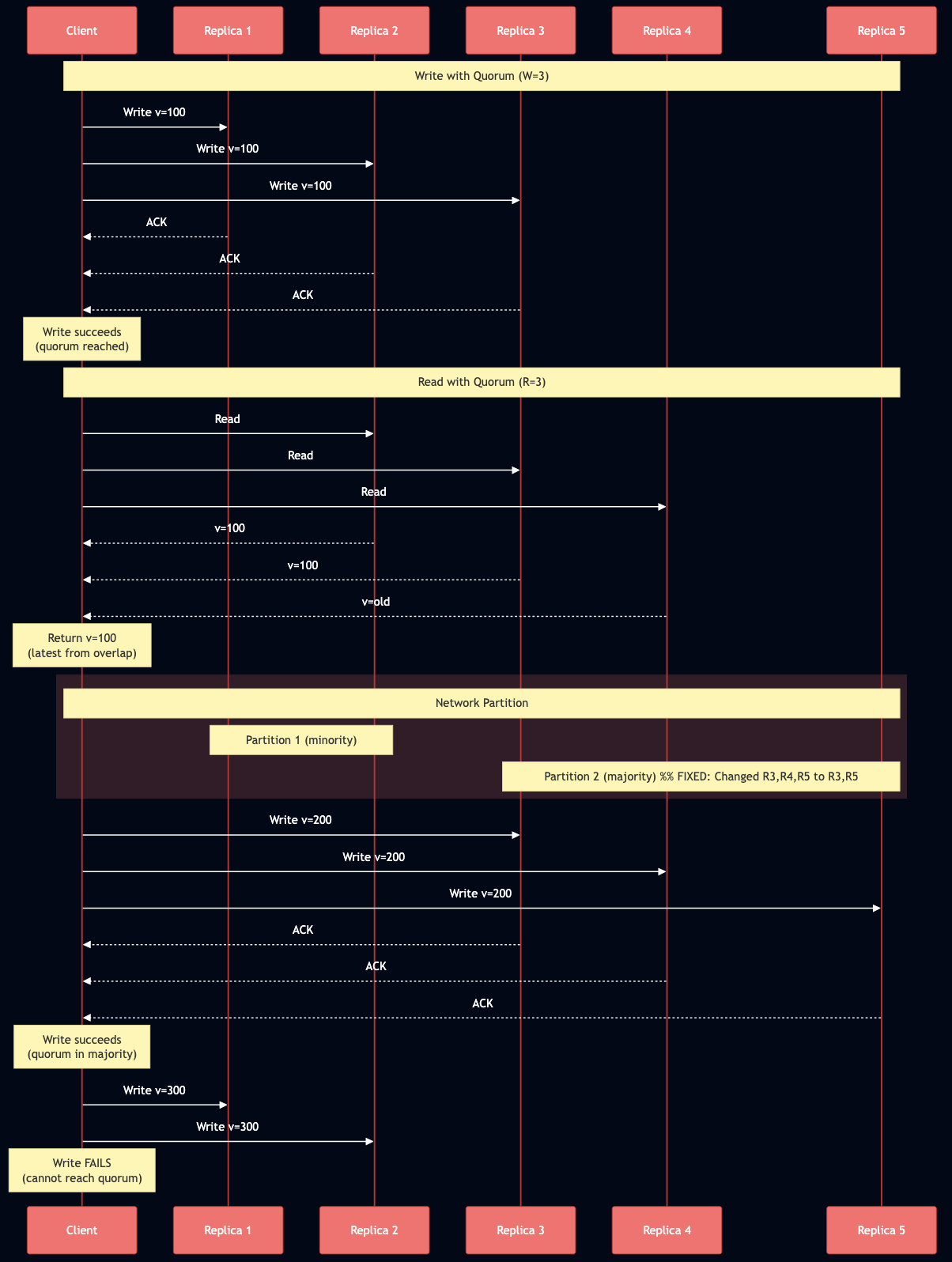
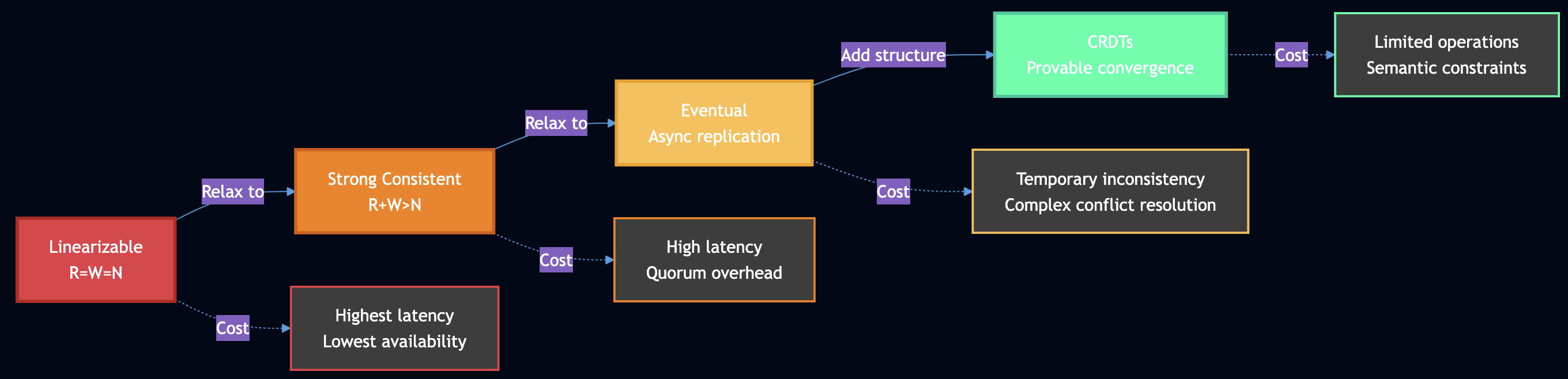
When R + W > N (read quorum + write quorum > total replicas), the read and write sets must overlap in at least one node. This overlap ensures that any read sees at least one node with the latest write, providing linearizability.
Example with N=5, R=3, W=3:
Write to replicas {1, 2, 3}
Read from replicas {2, 3, 4}
Overlap at {2, 3} guarantees we see the latest value
Critical Nuances:
R + W > N alone is NOT sufficient for linearizability in practice. You need additional mechanisms: readers must perform read repair synchronously before returning results, and writers must read the latest state from a quorum before writing. “Last write wins” based on wall-clock time breaks linearizability due to clock skew. Sloppy quorums like those used in Dynamo are NOT linearizable because the nodes in the quorum can change during failures. Even R = W = N doesn’t guarantee consistency if cluster membership changes. Google Spanner uses atomic clocks and GPS to achieve strong consistency globally, with TrueTime API providing less than 1ms clock uncertainty at the 99th percentile as of 2023.
How the Simulator Works
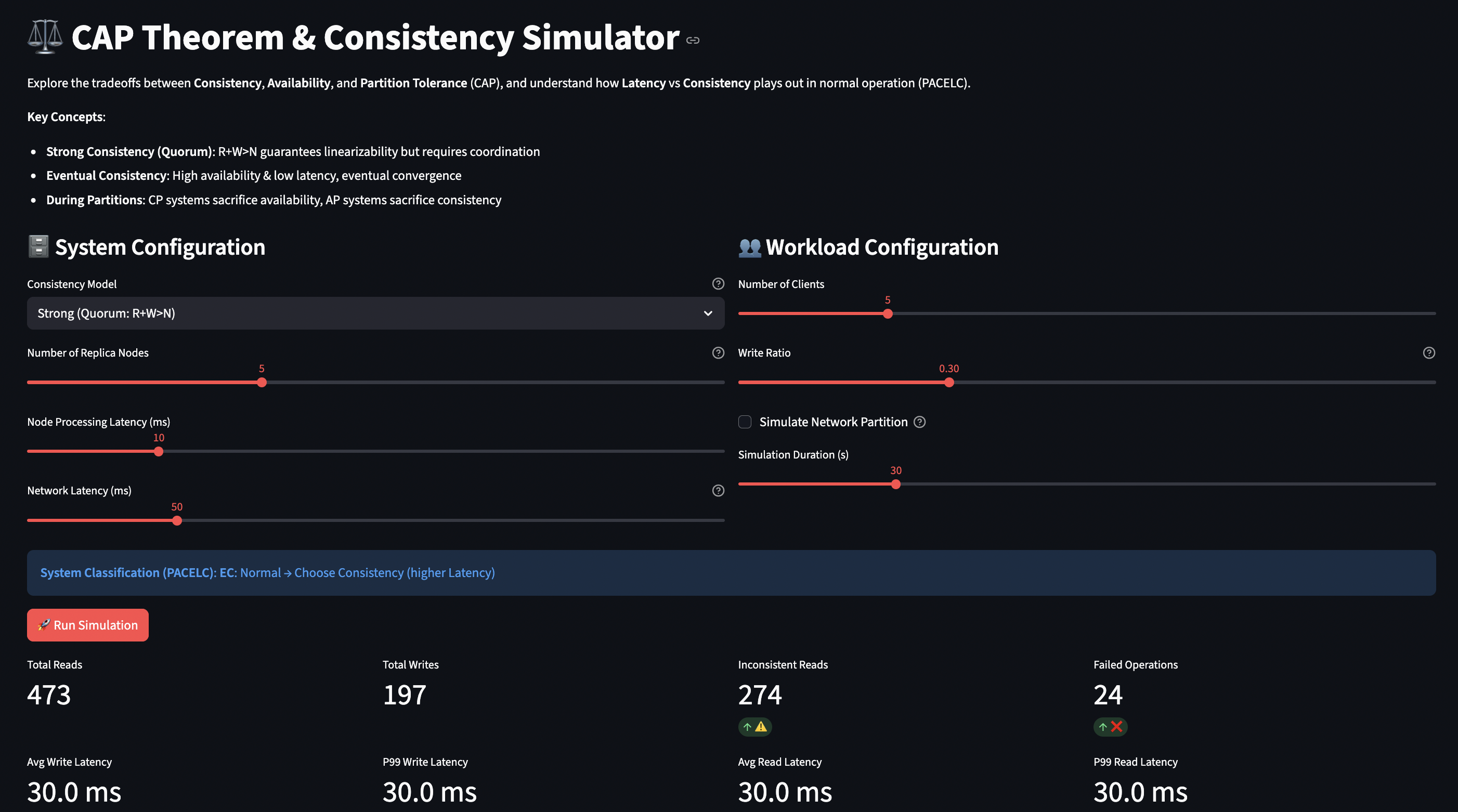
The CAP/PACELC simulator lets you explore these tradeoffs by configuring different consistency models and observing their behavior during normal operation and network partitions.
System Model:
N replica nodes, each with local storage
Configurable schema for data (to test compatibility)
Network latency between nodes (WAN vs LAN)
Optional partition mode (splits cluster)
Consistency Levels:
Strong (R+W>N): Quorum reads and writes, linearizable
Linearizable (R=W=N): All nodes must respond, highest consistency
Weak (R=1, W=1): Single node, eventual consistency
More nodes = more fault tolerance but higher coordination cost
consistency_level
Strong/Eventual/etc
Directly controls latency vs consistency tradeoff
base_latency
Node processing time
Baseline performance
network_latency
Inter-node delay
WAN (50-150ms) vs LAN (1-10ms) dramatically affects quorum cost
partition_active
Network partition
Tests CAP behavior (A vs C during partition)
write_ratio
Read/write mix
Write-heavy shows coordination bottleneck
What You Can Learn:
Latency cost of consistency:
Run with Strong (R=3,W=3) at network_latency=5ms ? ~15ms operations
Same at network_latency=100ms ? ~300ms operations
Switch to Weak (R=1,W=1) ? single-digit milliseconds regardless
CAP during partitions:
Enable partition with Strong consistency ? operations fail (choosing C over A)
Enable partition with Eventual ? stale reads but available (choosing A over C)
Quorum size tradeoffs:
Linearizable (R=W=N) ? single node failure breaks everything
Strong (R=W=3 of N=5) ? can tolerate 2 node failures
Measure failure rate vs consistency guarantees
Geographic distribution:
Network latency 10ms (same datacenter) ? quorum cost moderate
Network latency 150ms (cross-continent) ? quorum cost severe
Observe when you should use eventual consistency for geo-distribution
The simulator tracks write/read latencies, inconsistent reads, failed operations, and success rates, giving you quantitative data on the tradeoffs.
Key Insights from Simulation
The simulator reveals that most architectural decisions are driven by normal operation latency, not partition handling. If you’re building a global system with 150ms cross-region latency, strong consistency means every operation takes 150ms+ for quorum coordination. That’s often unacceptable for user-facing features. This is why hybrid approaches are becoming standard: use strong consistency for critical invariants (financial transactions, inventory), eventual consistency for everything else (user profiles, preferences).
Part 3: CRDTs
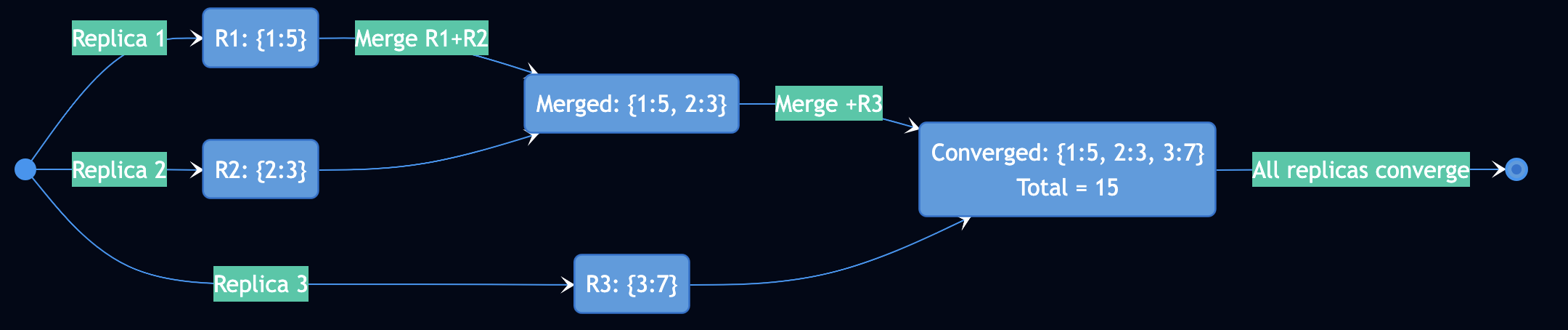
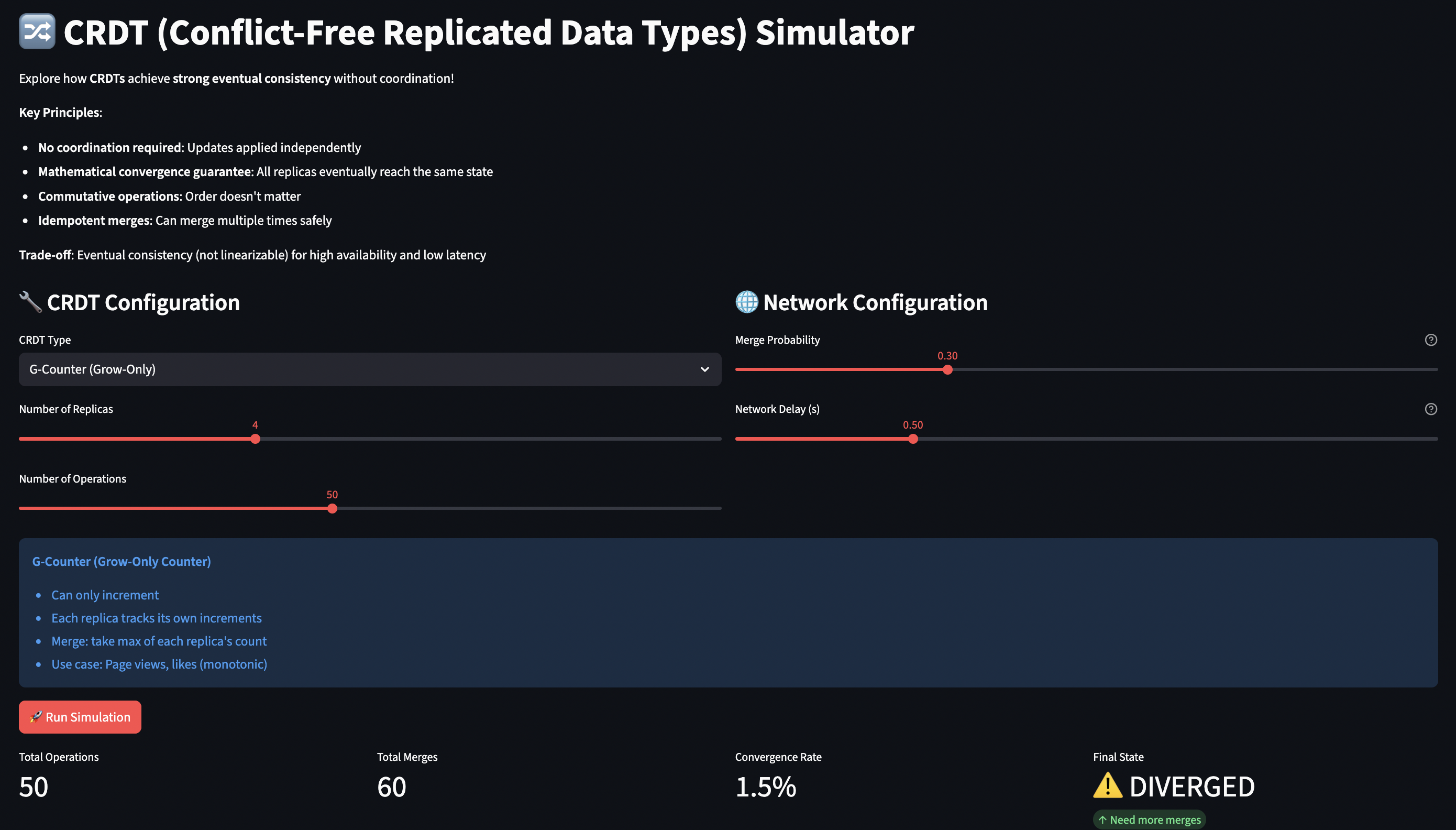
CRDTs (Conflict-Free Replicated Data Types) provide strong eventual consistency (SEC) through mathematical guarantees, not probabilistic convergence. They work without coordination, consensus, or concurrency control. CRDTs rely on operations being commutative (order doesn’t matter), merge functions being associative and idempotent (forming a semilattice), and updates being monotonic according to a partial order.
Example: G-Counter (Grow-Only Counter)
class GCounter:
def __init__(self, replica_id):
self.counts = {} # replica_id -> count
def increment(self, amount=1):
# Each replica tracks its own increments
self.counts[self.replica_id] = self.counts.get(self.replica_id, 0) + amount
def value(self):
# Total is sum of all replicas
return sum(self.counts.values())
def merge(self, other):
# Take max of each replica's count
for replica_id, count in other.counts.items():
self.counts[replica_id] = max(self.counts.get(replica_id, 0), count)
Why this works:
Each replica only increments its own counter (no conflicts)
Merge takes max (idempotent: max(a,a) = a)
Order doesn’t matter: max(max(a,b),c) = max(a,max(b,c))
Eventually all replicas see all increments ? convergence
CRDT Types
There are two main approaches: State-based CRDTs (CvRDTs) send full local state and require merge functions to be commutative, associative, and idempotent. Operation-based CRDTs (CmRDTs) transmit only update operations and require reliable delivery in causal order. Delta-state CRDTs combine the advantages by transmitting compact deltas.
Four CRDTs in the Simulator:
G-Counter: Increment only, perfect for metrics
PN-Counter: Increment and decrement (two G-Counters)
OR-Set: Add/remove elements, concurrent add wins
LWW-Map: Last-write-wins with timestamps
Production systems using CRDTs include Redis Enterprise (CRDBs), Riak, Azure Cosmos DB for distributed data types, and Automerge/Yjs for collaborative editing like Google Docs. SoundCloud uses CRDTs in their audio distribution platform.
Important Limitations
CRDTs only provide eventual consistency, NOT strong consistency or linearizability. Different replicas can see concurrent operations in different orders temporarily. Not all operations are naturally commutative, and CRDTs cannot solve problems requiring atomic coordination like preventing double-booking without additional mechanisms.
The “Shopping Cart Problem”: You can use an OR-Set for shopping cart items, but if two clients concurrently remove the same item, your naive implementation might remove both. The CRDT guarantees convergence to a consistent state, but that state might not match user expectations.
Byzantine fault tolerance is also a concern as traditional CRDTs assume all devices are trustworthy. Malicious devices can create permanent inconsistencies.
How the Simulator Works
The CRDT simulator demonstrates convergence through gossip-based replication. You can watch replicas diverge and converge as they exchange state.
Simulation Model:
Multiple replica nodes, each with independent CRDT state
Operations applied to random replicas (simulating distributed clients)
Periodic “merges” (gossip protocol) with probability merge_probability
Network delay between merges
Tracks convergence: do all replicas have identical state?
CRDT Implementations: Each CRDT type has its own semantics:
# G-Counter: Each replica has its own count, merge takes max
def merge(self, other):
for replica_id, count in other.counts.items():
self.counts[replica_id] = max(self.counts.get(replica_id, 0), count)
# OR-Set: Elements have unique tags, add always beats remove
def add(self, element, unique_tag):
self.elements[element].add(unique_tag)
def remove(self, element, observed_tags):
self.elements[element] -= observed_tags # Only remove what was observed
# LWW-Map: Latest timestamp wins
def set(self, key, value, timestamp):
current = self.entries.get(key)
if current is None or timestamp > current[1]:
self.entries[key] = (value, timestamp, self.replica_id)
Key Parameters:
Parameter
What It Tests
Values
crdt_type
Different convergence semantics
G-Counter, PN-Counter, OR-Set, LWW-Map
n_replicas
Number of nodes
2-8
n_operations
Total updates
10-100
merge_probability
Gossip frequency
0.0-1.0
network_delay
Time for state exchange
0.0-2.0s
What You Can Learn:
Convergence speed:
Set merge_probability=0.1 ? slow convergence, replicas stay diverged
Set merge_probability=0.8 ? fast convergence
Understand gossip frequency vs consistency window tradeoff
OR-Set semantics:
Watch concurrent add/remove ? add wins
See how unique tags prevent unintended deletions
Compare with naive set implementation
LWW-Map data loss:
Two replicas set same key concurrently with different values
One value “wins” based on timestamp (or replica ID tie-break)
Data loss is possible – not suitable for all use cases
Network partition tolerance:
Low merge probability simulates partition
Replicas diverge but operations still succeed (AP in CAP)
After “partition heals” (merges resume), all converge
No coordination needed, no operations failed
The simulator visually shows replica states over time and convergence status, making abstract CRDT theory concrete.
Key Insights from Simulation
CRDTs trade immediate consistency for availability and partition tolerance. The theoretical guarantees are proven: if all replicas receive all updates (eventual delivery), they will converge to the same state (strong convergence).
But the simulator reveals the practical challenges:
Merge semantics don’t always match user intent (LWW can lose data)
Tombstones can grow indefinitely (OR-Set needs garbage collection)
Causal ordering adds complexity (need vector clocks for some CRDTs)
Not suitable for operations requiring coordination (uniqueness constraints, atomic updates)
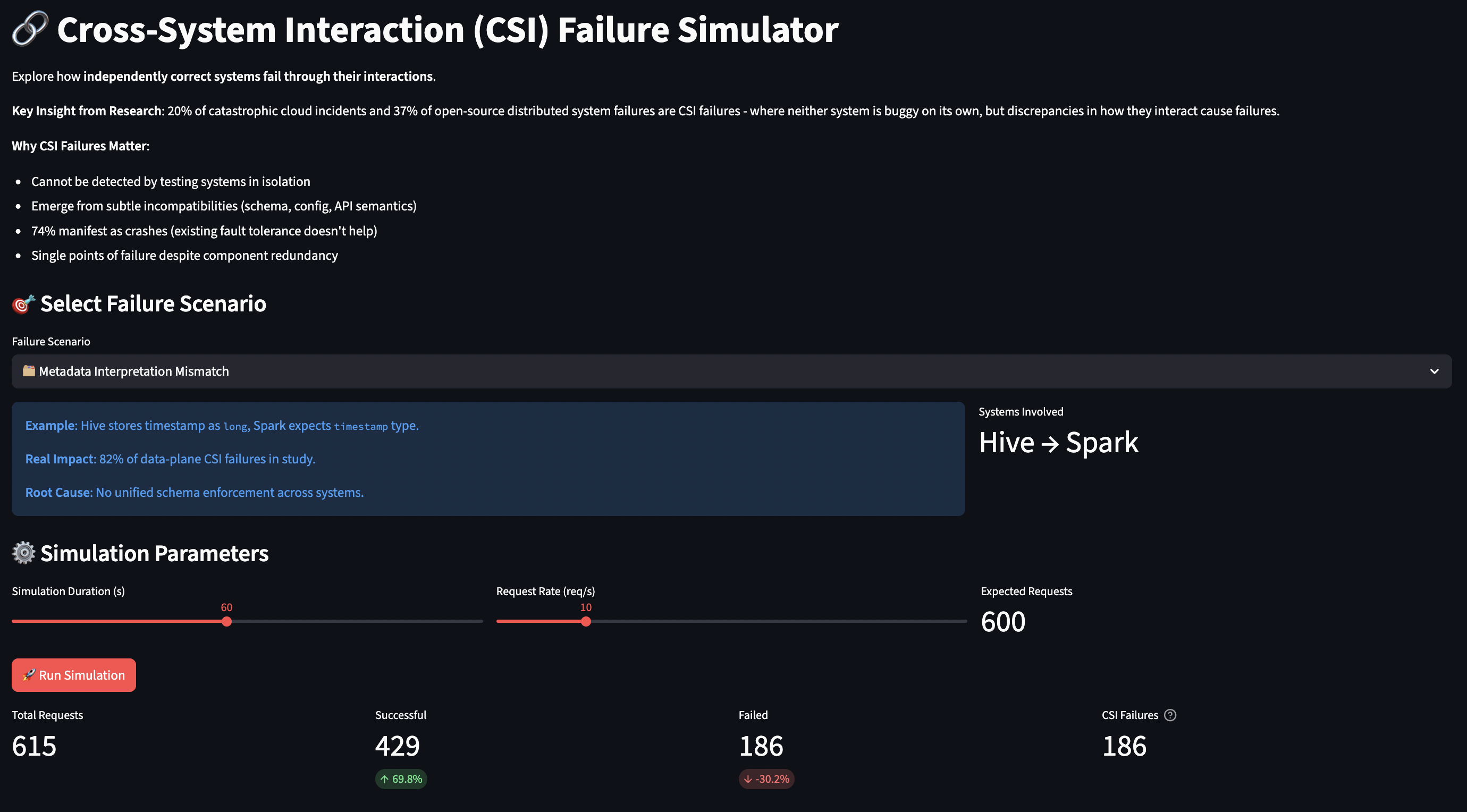
Research from EuroSys 2023 found that 20% of catastrophic cloud incidents and 37% of failures in major open-source distributed systems are CSI failures – where both systems work correctly in isolation but fail when connected. This is the NASA Mars Climate Orbiter problem: one team used metric units, another used imperial. Both systems worked perfectly. The spacecraft burned up in Mars’s atmosphere because of their interaction.
Why CSI Failures Are Different
Not dependency failures: The downstream system is available, it just can’t process what upstream sends.
Not library bugs: Libraries are single-address-space and well-tested. CSI failures cross system boundaries where testing is expensive.
Not component failures: Each system passes its own test suite. The bug only emerges through interaction.
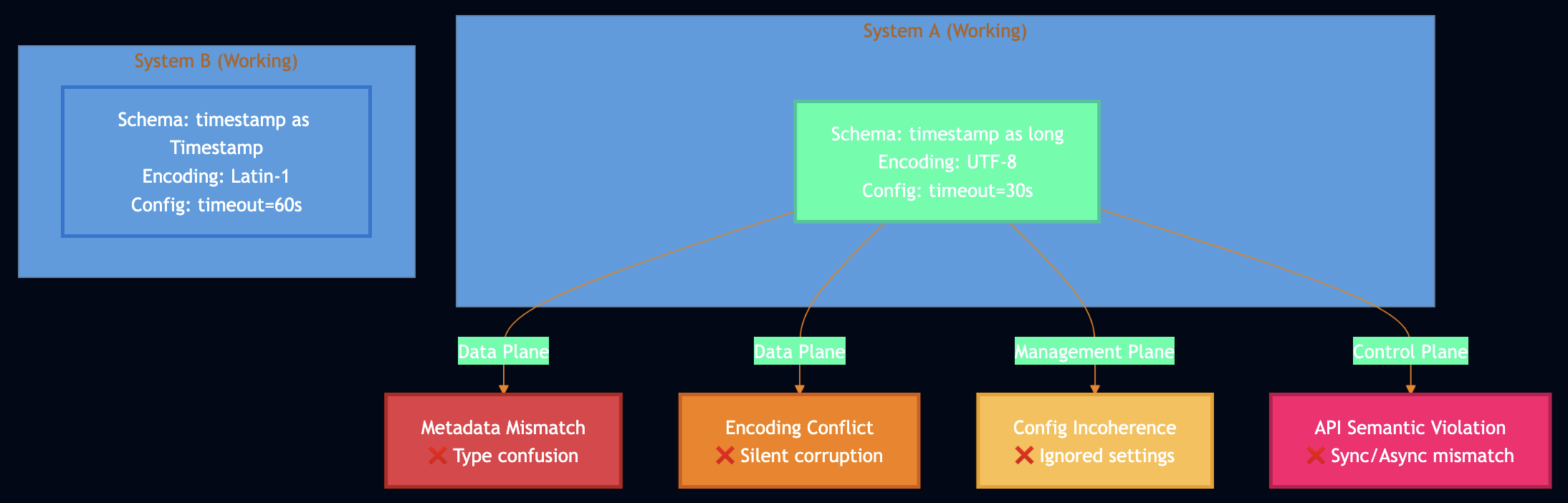
CSI failures manifest across three planes: Data plane (51% – schema/metadata mismatches), Management plane (32% – configuration incoherence), and Control plane (17% – API semantic violations).
For example, study of Apache Spark-Hive integration found 15 distinct discrepancies in simple write-read testing. Hive stored timestamps as long (milliseconds since epoch), Spark expected Timestamp type. Both worked in isolation, failed when integrated. Kafka and Flink encoding mismatch: Kafka set compression.type=lz4, Flink couldn’t decompress due to old LZ4 library. Configuration was silently ignored in Flink, leading to data corruption for 2 weeks before detection.
Why Testing Doesn’t Catch CSI Failures
Analysis of Spark found only 6% of integration tests actually test cross-system interaction. Most “integration tests” test multiple components of the same system. Cross-system testing is expensive and often skipped. The problem compounds with modern architectures:
Microservices: More system boundaries to test
Multi-cloud: Different clouds with different semantics
Serverless: Fine-grained composition increases interaction surface area
How the Simulator Works
The CSI failure simulator models two systems exchanging data, with configurable discrepancies in schemas, encodings, and configurations.
System Model:
Two systems (upstream ? downstream)
Each has its own schema definition (field types, encoding, nullable fields)
Each has its own configuration (timeouts, retry counts, etc.)
Data flows from System A to System B with potential conversion failures
Failure Scenarios:
Metadata Mismatch (Hive/Spark):
System A: timestamp: long
System B: timestamp: Timestamp
Failure: Type coercion fails ~30% of the time
Schema Conflict (Producer/Consumer):
System A: encoding: latin-1
System B: encoding: utf-8
Failure: Silent data corruption
Configuration Incoherence (ServiceA/ServiceB):
System A: max_retries=3, timeout=30s
System B expects: max_retries=5, timeout=60s
Failure: ~40% of requests fail due to premature timeout
API Semantic Violation (Upstream/Downstream):
Upstream assumes: synchronous, thread-safe
Downstream is: asynchronous, not thread-safe
Failure: Race conditions, out-of-order processing
Type Confusion (SystemA/SystemB):
System A: amount: float
System B: amount: decimal
Failure: Precision loss in financial calculations
Implementation Details:
class DataSchema:
def __init__(self, schema_id, fields, encoding, nullable_fields):
self.fields = fields # field_name -> type
self.encoding = encoding
def is_compatible(self, other):
# Check field types and encoding
return (self.fields == other.fields and
self.encoding == other.encoding)
class DataRecord:
def serialize(self, target_schema):
# Attempt type coercion
for field, value in self.data.items():
expected_type = target_schema.fields[field]
actual_type = self.schema.fields[field]
if expected_type != actual_type:
# 30% failure on type mismatch (simulating real world)
if random.random() < 0.3:
return None # Serialization failure
# Check encoding compatibility
if self.schema.encoding != target_schema.encoding:
if random.random() < 0.2: # 20% silent corruption
return None
Key Parameters:
Parameter
What It Tests
failure_scenario
Type of CSI failure (metadata, schema, config, API, type)
duration
Simulation length
request_rate
Load (requests per second)
The simulator doesn’t have many tunable parameters because CSI failures are about specific incompatibilities, not gradual degradation. Each scenario models a real-world pattern.
What You Can Learn:
Failure rates: CSI failures often manifest in 20-40% of requests (not 100%)
Some requests happen to have compatible data
Makes debugging harder (intermittent failures)
Failure location:
Research shows 69% of CSI fixes go in the upstream system, often in connector modules that are less than 5% of the codebase
Simulator shows which system fails (usually downstream)
Silent vs loud failures:
Type mismatches often crash (loud, easy to detect)
Encoding mismatches corrupt silently (hard to detect)
The simulator demonstrates that cross-system integration testing is essential but often skipped. Unit tests of each system won’t catch these failures.
Prevention strategies validated by simulation:
Write-Read Testing: Write with System A, read with System B, verify integrity
Schema Registry: Single source of truth for data schemas, enforced across systems
Configuration Coherence Checking: Validate that shared configs match
Contract Testing: Explicit, machine-checkable API contracts
Hybrid Consistency Models
Modern systems increasingly use mixed consistency: RedBlue Consistency (2012) marks operations as needing strong consistency (red) or eventual consistency (blue). Replicache (2024) has the server assign final total order while clients do optimistic local updates with rebase. For example: Calendar Application
# Strong consistency for room reservations (prevent double-booking)
def book_conference_room(room_id, time_slot):
with transaction(consistency='STRONG'):
if room.is_available(time_slot):
room.book(time_slot)
return True
return False
# CRDTs for collaborative editing (participant lists, notes)
def update_meeting_notes(meeting_id, notes):
# LWW-Map CRDT, eventual consistency
meeting.notes.merge(notes)
# Eventual consistency for preferences
def update_user_calendar_color(user_id, color):
# Who cares if this propagates slowly?
user_prefs[user_id] = color
Recent theoretical work on the CALM theorem proves that coordination-free consistency is achievable for certain problem classes. Research in 2025 provided mathematical definitions of when coordination is and isn’t required, separating coordination from computation.
What the Simulators Teach Us
Running all four simulators reveals the consistency spectrum:
No “best” consistency model exists:
Quorums are best when you need linearizability and can tolerate latency
CRDTs are best when you need high availability and can tolerate eventual consistency
Neither approach “bypasses” CAP – they make different tradeoffs
Real systems use hybrid models with different consistency for different operations
Practical Lessons
1. Design for Recovery, Not Just Prevention
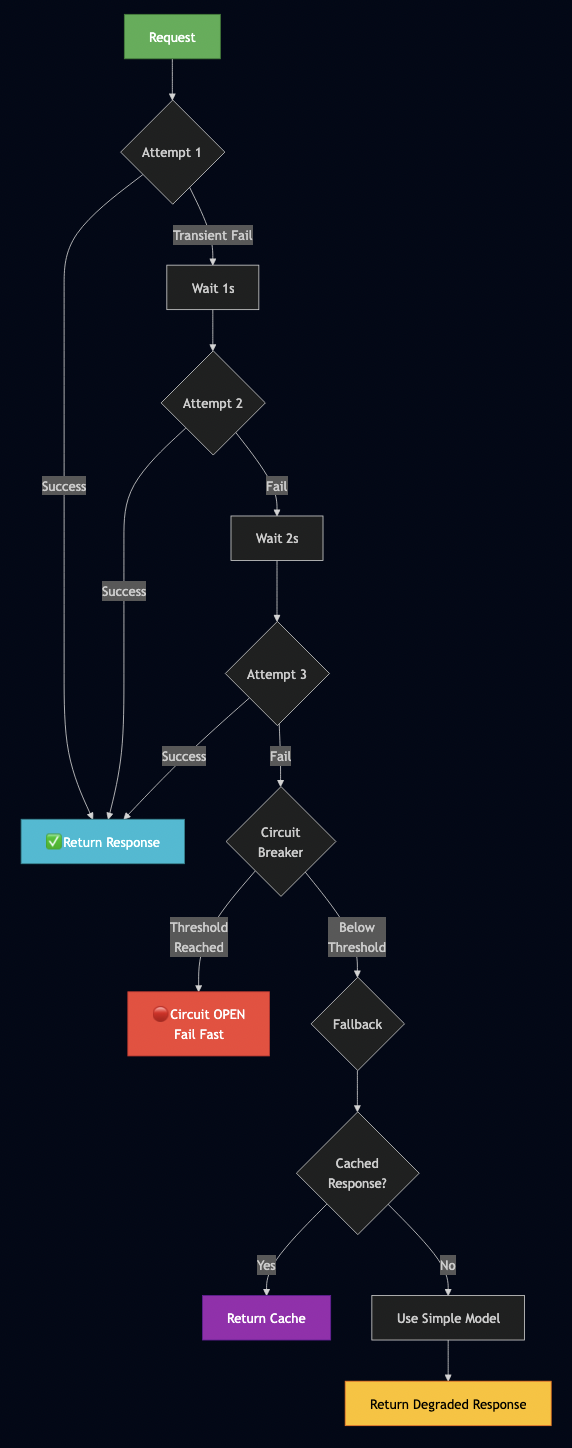
The metastable failure simulator shows you can’t prevent all failures. Your retry logic, backoff strategy, and circuit breakers are more important than your happy path code. Validated strategies include:
Exponential backoff with jitter (spread retries over time)
Adaptive retry budgets (limit total fleet-wide retries)
Circuit breakers (detect patterns, stop storms)
Load shedding (fail fast rather than queue to death)
2. Understand the Consistency Spectrum
The CAP/PACELC simulator demonstrates that consistency is not binary. You need to understand:
What consistency level do you actually need? (Most operations don’t need linearizability)
What’s the latency cost? (Quorum reads in cross-region deployment can be 100x slower)
What happens during partitions? (Can you sacrifice availability or must you serve stale data?)
Decision framework:
Use strong consistency for: money, inventory, locks, compliance
Use eventual consistency for: feeds, catalogs, analytics, caches
Use hybrid models for: most real-world applications
3. Test Cross-System Interactions
The CSI failure simulator reveals that 86% of fixes go into connector modules that are less than 5% of your codebase. This is where bugs hide. Essential tests include:
Write-read tests (write with System A, read with System B)
Round-trip tests (serialize/deserialize across boundaries)
Version compatibility matrix (test combinations)
Schema validation (machine-checkable contracts)
4. Leverage CRDTs Where Appropriate
The CRDT simulator shows that conflict-free convergence is possible for specific problem types. But you need to:
Understand the semantic limitations (LWW can lose data)
Design merge behavior carefully (does it match user intent?)
git clone https://github.com/bhatti/simulators
cd simulators
pip install -r requirements.txt
Requirements:
Python 3.7+
streamlit (web UI)
simpy (discrete event simulation)
plotly (interactive visualizations)
numpy, pandas (data analysis)
Running Individual Simulators
# Metastable failure simulator
streamlit run metastable_simulator.py
# CAP/PACELC consistency simulator
streamlit run cap_consistency_simulator.py
# CRDT simulator
streamlit run crdt_simulator.py
# CSI failure simulator
streamlit run csi_failure_simulator.py
Running All Simulators
python run_all_simulators.py
Conclusion
Building distributed systems means confronting failure modes that are expensive or impossible to reproduce in real environments:
Metastable failures require specific load patterns and timing
Consistency tradeoffs need multi-region deployments to observe
CRDT convergence requires orchestrating concurrent operations across replicas
CSI failures need exact schema/config mismatches that don’t exist in test environments
Simulators bridge the gap between theoretical understanding and practical intuition:
Cheaper than production testing: No cloud costs, no multi-region setup, instant feedback
Safer than production experiments: Crash the simulator, not your service
More complete than unit tests: See emergent behaviors, not just component correctness
Faster iteration: Tweak parameters, re-run in seconds, build intuition through experimentation
What You Can’t Learn Without Simulation
When does retry amplification tip into metastability? (Depends on coordination slope, timeout, backoff)
How much does quorum coordination actually cost? (Depends on network latency, replica count, workload)
Do your CRDT semantics match user expectations? (Depends on merge behavior, conflict resolution)
Will your schema changes break integration? (Depends on type coercion, encoding, version skew)
The goal isn’t to prevent all failures, that’s impossible. The goal is to understand, anticipate, and recover from the failures that will inevitably occur.
References
Key research papers and resources used in this post:
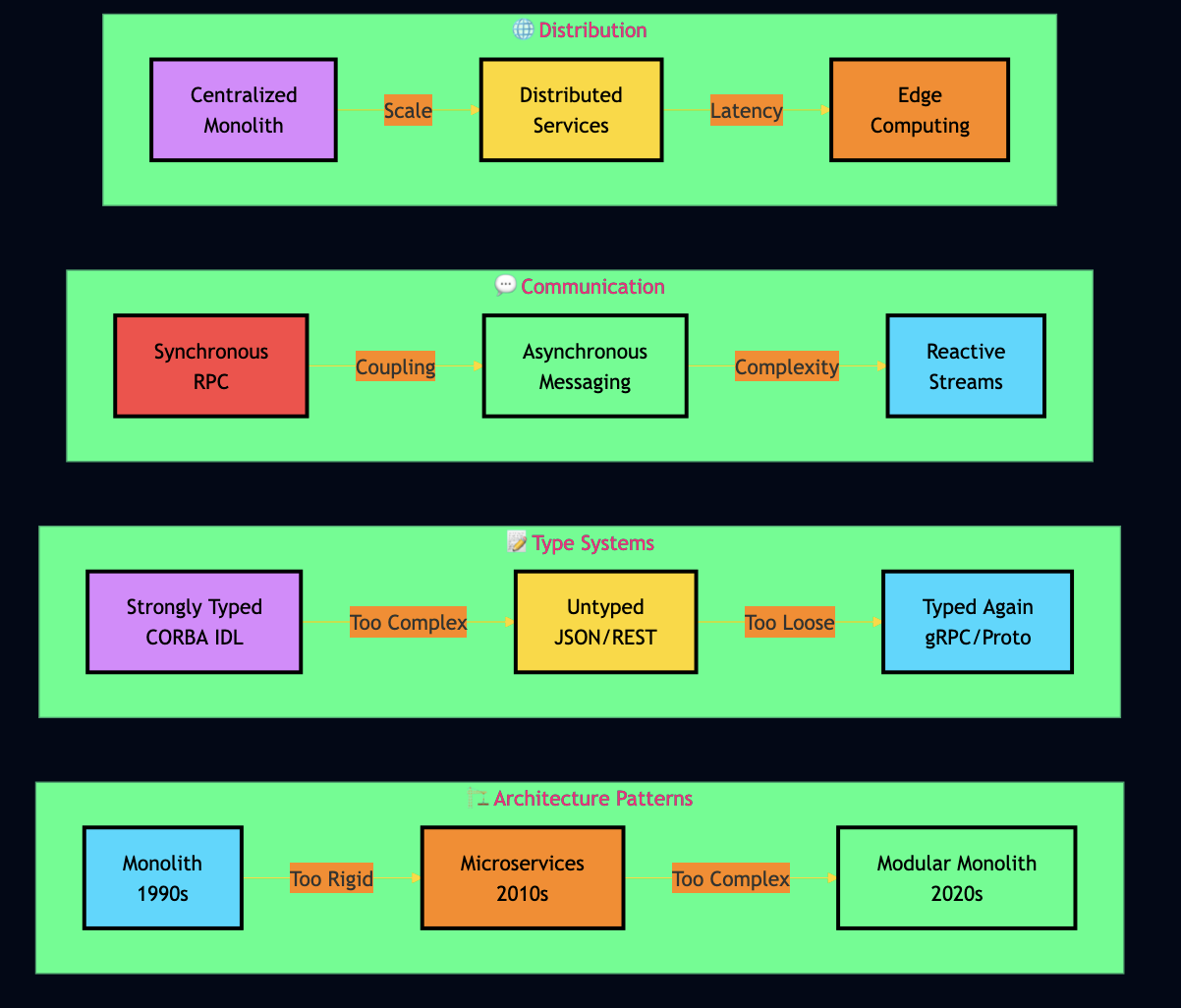
I started writing network code in the early 1990s on IBM mainframes, armed with nothing but Assembly and COBOL. Today, I build distributed AI agents using gRPC, RAG pipelines, and serverless functions. Between these worlds lie decades of technological evolution and an uncomfortable realization: we keep relearning the same lessons. Over the years, I’ve seen simple ideas triumph over complex ones. The technology keeps changing, but the problems stay the same. Network latency hasn’t gotten faster relative to CPU speed. Distributed systems are still hard. Complexity still kills projects. And every new generation has to learn that abstractions leak. I’ll show you the technologies I’ve used, the mistakes I’ve made, and most importantly, what the past teaches us about building better systems in the future.
The Mainframe Era
CICS and 3270 Terminals
I started my career on IBM mainframes running CICS, which was used to build online applications accessed through 3270 “green screen” terminals. It used LU6.2 (Logical Unit 6.2) protocol, part of IBM’s Systems Network Architecture (SNA) to provide peer-to-peer communication. Here’s what a typical CICS application looked like in COBOL:
The CICS environment handled all the complexity—transaction management, terminal I/O, file access, and inter-system communication. For the user interface, I used Basic Mapping Support (BMS), which was notoriously finicky. You had to define screen layouts in a rigid format specifying exactly where each field appeared on the 24×80 character grid:
CUSTMAP DFHMSD TYPE=&SYSPARM, X
MODE=INOUT, X
LANG=COBOL, X
CTRL=FREEKB
DFHMDI SIZE=(24,80)
CUSTID DFHMDF POS=(05,20), X
LENGTH=08, X
ATTRB=(UNPROT,NUM), X
INITIAL='________'
CUSTNAME DFHMDF POS=(07,20), X
LENGTH=30, X
ATTRB=PROT
This was so painful that I wrote my own tool to convert simple text-based UI templates into BMS format. Looking back, this was my first foray into creating developer tools. Key lesson I learned from the mainframe era was that developer experience mattered. Cumbersome tools slow down development and introduce errors.
Moving to UNIX
Berkeley Sockets
After working on mainframes for a couple of years, I saw the mainframes were already in decline and I then transitioned to C and UNIX systems, which I studied previously in my college. I learned about Berkeley Sockets, which was a lot more powerful and you had complete control over the network. Here’s a simple TCP server in C using Berkeley Sockets:
As you can see, you had to track a lot of housekeeping like socket creation, binding, listening, accepting, reading, writing, and meticulous error handling at every step. Memory management was entirely manual—forget to close() a file descriptor and you’d leak resources. If you make a mistake with recv() buffer sizes and you’d overflow memory. I also experimented with Fast Sockets from UC Berkeley, which used kernel bypass techniques for lower latency and offered better performance.
Key lesson I learned was that low-level control comes at a steep cost. The cognitive load of managing these details makes it nearly impossible to focus on business logic.
Sun RPC and XDR
When working for a physics lab with a large computing facilities consists of Sun workstations, Solaris, and SPARC processors, I discovered Sun RPC (Remote Procedure Call) with XDR (External Data Representation). XDR solved a critical problem: how do you exchange data between machines with different architectures? A SPARC processor uses big-endian byte ordering, while x86 uses little-endian. XDR provided a canonical, architecture-neutral format for representing data. Here’s an XDR definition file (types.x):
/* Define a structure for customer data */
struct customer {
int customer_id;
string name<30>;
float balance;
};
/* Define the RPC program */
program CUSTOMER_PROG {
version CUSTOMER_VERS {
int ADD_CUSTOMER(customer) = 1;
customer GET_CUSTOMER(int) = 2;
} = 1;
} = 0x20000001;
You’d run rpcgen on this file:
$ rpcgen types.x
This generated the client stub, server stub, and XDR serialization code automatically. Here’s what the server implementation looked like:
This was my first introduction to Interface Definition Languages (IDL) and I found that defining the contract once and generating code automatically reduces errors. This pattern would reappear in CORBA, Protocol Buffers, and gRPC.
Parallel Computing
During my graduate and post-graduate studies in mid 1990s while working full time, I researched into the parallel and distributed computing. I worked with MPI (Message Passing Interface) and IBM’s MPL on SP1/SP2 systems. MPI provided collective operations like broadcast, scatter, gather, and reduce (predecessor to Hadoop like map/reduce). Here’s a simple MPI example that computes the sum of an array in parallel:
#include <mpi.h>
#include <stdio.h>
#include <stdlib.h>
#define ARRAY_SIZE 1000
int main(int argc, char** argv) {
int rank, size;
int data[ARRAY_SIZE];
int local_sum = 0, global_sum = 0;
int chunk_size, start, end;
MPI_Init(&argc, &argv);
MPI_Comm_rank(MPI_COMM_WORLD, &rank);
MPI_Comm_size(MPI_COMM_WORLD, &size);
// Initialize data on root
if (rank == 0) {
for (int i = 0; i < ARRAY_SIZE; i++) {
data[i] = i + 1;
}
}
// Broadcast data to all processes
MPI_Bcast(data, ARRAY_SIZE, MPI_INT, 0, MPI_COMM_WORLD);
// Each process computes sum of its chunk
chunk_size = ARRAY_SIZE / size;
start = rank * chunk_size;
end = (rank == size - 1) ? ARRAY_SIZE : start + chunk_size;
for (int i = start; i < end; i++) {
local_sum += data[i];
}
// Reduce all local sums to global sum
MPI_Reduce(&local_sum, &global_sum, 1, MPI_INT,
MPI_SUM, 0, MPI_COMM_WORLD);
if (rank == 0) {
printf("Global sum: %d\n", global_sum);
}
MPI_Finalize();
return 0;
}
For my post-graduate project, I built JavaNOW (Java on Networks of Workstations), which was inspired by Linda’s tuple spaces and MPI’s collective operations, but implemented in pure Java for portability. The key innovation was our Actor-inspired model. Instead of heavyweight processes communicating through message passing, I used lightweight Java threads with an Entity Space (distributed associative memory) where “actors” could put and get entities asynchronously. Here’s a simple example:
public class SumTask extends ActiveEntity {
public Object execute(Object arg, JavaNOWAPI api) {
Integer myId = (Integer) arg;
EntitySpace workspace = new EntitySpace("RESULTS");
// Compute partial sum
int partialSum = 0;
for (int i = myId * 100; i < (myId + 1) * 100; i++) {
partialSum += i;
}
// Store result in EntitySpace
return new Integer(partialSum);
}
}
// Main application
public class ParallelSum extends JavaNOWApplication {
public void master() {
EntitySpace workspace = new EntitySpace("RESULTS");
// Spawn parallel tasks
for (int i = 0; i < 10; i++) {
ActiveEntity task = new SumTask(new Integer(i));
getJavaNOWAPI().eval(workspace, task, new Integer(i));
}
// Collect results
int totalSum = 0;
for (int i = 0; i < 10; i++) {
Entity result = getJavaNOWAPI().get(
workspace, new Entity(new Integer(i)));
totalSum += ((Integer)result.getEntityValue()).intValue();
}
System.out.println("Total sum: " + totalSum);
}
public void slave(int id) {
// Slave nodes wait for work
}
}
Since then, I have seen the Actor model have gained a wide adoption. For example, today’s serverless functions (AWS Lambda, Azure Functions, Google Cloud Functions) and modern frameworks like Akka, Orleans, and Dapr all embrace Actor-inspired patterns.
Novell and CGI
I also briefly worked with Novell’s IPX (Internetwork Packet Exchange) protocol, which had painful APIs. Here’s a taste of IPX socket programming (simplified):
When the web emerged in early 1990s, I built applications using CGI (Common Gateway Interface) with Perl and C. I deployed these on Apache HTTP Server, which was the first production-quality open source web server and quickly became the dominant web server of the 1990s. Apache used process-driven concurrency where it forked a new process for each request or maintained a pool of pre-forked processes. CGI was conceptually simple: the web server launched a new UNIX process for every request, passing input via stdin and receiving output via stdout. Here’s a simple Perl CGI script:
#!/usr/bin/perl
use strict;
use warnings;
use CGI;
my $cgi = CGI->new;
print $cgi->header('text/html');
print "<html><body>\n";
print "<h1>Hello from CGI!</h1>\n";
my $name = $cgi->param('name') || 'Guest';
print "<p>Welcome, $name!</p>\n";
# Simulate database query
my $user_count = 42;
print "<p>Total users: $user_count</p>\n";
print "</body></html>\n";
Later, I migrated to more performant servers: Tomcat for Java servlets, Jetty as an embedded server, and Netty for building custom high-performance network applications. These servers used asynchronous I/O and lightweight threads (or even non-blocking event loops in Netty‘s case).
Key Lesson I learned was that scalability matters. The CGI model’s inability to maintain persistent connections or share state made it unsuitable for modern web applications. The shift from process-per-request to thread pools and then to async I/O represented fundamental improvements in how we handle concurrency.
Java Adoption
When Java was released in 1995, I adopted it wholeheartedly. It saved developers from manual memory management using malloc() and free() debugging. Network programming became far more approachable:
import java.io.*;
import java.net.*;
public class SimpleServer {
public static void main(String[] args) throws IOException {
int port = 8080;
try (ServerSocket serverSocket = new ServerSocket(port)) {
System.out.println("Server listening on port " + port);
while (true) {
try (Socket clientSocket = serverSocket.accept();
BufferedReader in = new BufferedReader(
new InputStreamReader(clientSocket.getInputStream()));
PrintWriter out = new PrintWriter(
clientSocket.getOutputStream(), true)) {
String request = in.readLine();
System.out.println("Received: " + request);
out.println("Message received");
}
}
}
}
}
Java Threads
I had previously used pthreads in C, which were hard to use but Java’s threading model was far simpler:
public class ConcurrentServer {
public static void main(String[] args) throws IOException {
ServerSocket serverSocket = new ServerSocket(8080);
while (true) {
Socket clientSocket = serverSocket.accept();
// Spawn thread to handle client
new Thread(new ClientHandler(clientSocket)).start();
}
}
static class ClientHandler implements Runnable {
private Socket socket;
public ClientHandler(Socket socket) {
this.socket = socket;
}
public void run() {
try (BufferedReader in = new BufferedReader(
new InputStreamReader(socket.getInputStream()));
PrintWriter out = new PrintWriter(
socket.getOutputStream(), true)) {
String request = in.readLine();
// Process request
out.println("Response");
} catch (IOException e) {
e.printStackTrace();
} finally {
try { socket.close(); } catch (IOException e) {}
}
}
}
}
public class ThreadSafeCounter {
private int count = 0;
public synchronized void increment() {
count++;
}
public synchronized int getCount() {
return count;
}
}
This was so much easier than managing mutexes, condition variables, and semaphores in C!
Java RMI: Remote Objects Made
When Java added RMI (1997), distributed objects became practical. You could invoke methods on objects running on remote machines almost as if they were local. Define a remote interface:
import java.rmi.Remote;
import java.rmi.RemoteException;
public interface Calculator extends Remote {
int add(int a, int b) throws RemoteException;
int multiply(int a, int b) throws RemoteException;
}
Implement it:
import java.rmi.server.UnicastRemoteObject;
import java.rmi.RemoteException;
public class CalculatorImpl extends UnicastRemoteObject
implements Calculator {
public CalculatorImpl() throws RemoteException {
super();
}
public int add(int a, int b) throws RemoteException {
return a + b;
}
public int multiply(int a, int b) throws RemoteException {
return a * b;
}
}
Server:
import java.rmi.Naming;
import java.rmi.registry.LocateRegistry;
public class Server {
public static void main(String[] args) {
try {
LocateRegistry.createRegistry(1099);
Calculator calc = new CalculatorImpl();
Naming.rebind("Calculator", calc);
System.out.println("Server ready");
} catch (Exception e) {
e.printStackTrace();
}
}
}
Client:
import java.rmi.Naming;
public class Client {
public static void main(String[] args) {
try {
Calculator calc = (Calculator) Naming.lookup(
"rmi://localhost/Calculator");
int result = calc.add(5, 3);
System.out.println("5 + 3 = " + result);
} catch (Exception e) {
e.printStackTrace();
}
}
}
I found that RMI was constrained and everything had to extend Remote, and you were stuck with Java-to-Java communication. Key lesson I learned was that abstractions that feel natural to developers get adopted.
JINI: RMI with Service Discovery
At a travel booking company in the mid 2000s, I used JINI, which Sun Microsystems pitched as “RMI on steroids.” JINI extended RMI with automatic service discovery, leasing, and distributed events. The core idea: services could join a network, advertise themselves, and be discovered by clients without hardcoded locations. Here’s a JINI service interface and registration:
import net.jini.core.lookup.ServiceRegistrar;
import net.jini.discovery.LookupDiscovery;
import net.jini.lease.LeaseRenewalManager;
import java.rmi.Remote;
import java.rmi.RemoteException;
// Service interface
public interface BookingService extends Remote {
String searchFlights(String origin, String destination)
throws RemoteException;
boolean bookFlight(String flightId, String passenger)
throws RemoteException;
}
// Service provider
public class BookingServiceProvider implements DiscoveryListener {
public void discovered(DiscoveryEvent event) {
ServiceRegistrar[] registrars = event.getRegistrars();
for (ServiceRegistrar registrar : registrars) {
try {
BookingService service = new BookingServiceImpl();
Entry[] attributes = new Entry[] {
new Name("FlightBookingService")
};
ServiceItem item = new ServiceItem(null, service, attributes);
ServiceRegistration reg = registrar.register(
item, Lease.FOREVER);
// Auto-renew lease
leaseManager.renewUntil(reg.getLease(), Lease.FOREVER, null);
} catch (Exception e) {
e.printStackTrace();
}
}
}
}
Client discovery and usage:
public class BookingClient implements DiscoveryListener {
public void discovered(DiscoveryEvent event) {
ServiceRegistrar[] registrars = event.getRegistrars();
for (ServiceRegistrar registrar : registrars) {
try {
ServiceTemplate template = new ServiceTemplate(
null, new Class[] { BookingService.class }, null);
ServiceItem item = registrar.lookup(template);
if (item != null) {
BookingService booking = (BookingService) item.service;
String flights = booking.searchFlights("SFO", "NYC");
booking.bookFlight("FL123", "John Smith");
}
} catch (Exception e) {
e.printStackTrace();
}
}
}
}
Though, JINI provided automatic discovery, leasing and location transparency but it was too complex and only supported Java ecosystem. The ideas were sound and reappeared later in service meshes (Consul, Eureka) and Kubernetes service discovery. I learned that service discovery is essential for dynamic systems, but the implementation must be simple.
CORBA
I used CORBA (Common Object Request Broker Architecture) for many years in 1990s when building intelligent traffic Systems. CORBA promised the language-independent, platform-independent distributed objects. You could write a service in C++, invoke it from Java, and have clients in Python using the same IDL. Here’s a simple CORBA IDL definition:
This generated client stubs and server skeletons for your target language. I built a message-oriented middleware (MOM) system with CORBA that collected traffic data from road sensors and provided real-time traffic information.
C++ server implementation:
#include "TrafficService_impl.h"
#include <iostream>
#include <vector>
class TrafficServiceImpl : public POA_TrafficMonitor::TrafficService {
private:
std::vector<TrafficMonitor::SensorData> data_store;
public:
void reportData(const TrafficMonitor::SensorData& data) {
data_store.push_back(data);
std::cout << "Received data from sensor "
<< data.sensor_id << std::endl;
}
TrafficMonitor::SensorDataList* getRecentData(CORBA::Long minutes) {
TrafficMonitor::SensorDataList* result =
new TrafficMonitor::SensorDataList();
// Filter data from last N minutes
time_t cutoff = time(NULL) - (minutes * 60);
for (const auto& entry : data_store) {
if (entry.timestamp >= cutoff) {
result->length(result->length() + 1);
(*result)[result->length() - 1] = entry;
}
}
return result;
}
CORBA::Float getAverageSpeed() {
if (data_store.empty()) return 0.0;
float sum = 0.0;
for (const auto& entry : data_store) {
sum += entry.speed;
}
return sum / data_store.size();
}
};
Java client:
import org.omg.CORBA.*;
import TrafficMonitor.*;
public class TrafficClient {
public static void main(String[] args) {
try {
// Initialize ORB
ORB orb = ORB.init(args, null);
// Get reference to service
org.omg.CORBA.Object obj =
orb.string_to_object("corbaname::localhost:1050#TrafficService");
TrafficService service = TrafficServiceHelper.narrow(obj);
// Report sensor data
SensorData data = new SensorData();
data.sensor_id = 101;
data.speed = 65.5f;
data.timestamp = (int)(System.currentTimeMillis() / 1000);
service.reportData(data);
// Get average speed
float avgSpeed = service.getAverageSpeed();
System.out.println("Average speed: " + avgSpeed + " mph");
} catch (Exception e) {
e.printStackTrace();
}
}
}
However, CORBA specification was massive and different ORB (Object Request Broker) implementations like Orbix, ORBacus, and TAO couldn’t reliably interoperate despite claiming CORBA compliance. The binary protocol, IIOP, had subtle incompatibilities. CORBA did introduce valuable concepts:
Interceptors for cross-cutting concerns (authentication, logging, monitoring)
IDL-first design that forced clear interface definitions
Language-neutral protocols that actually worked (sometimes)
I learned that standards designed by committee are often over-engineer. CORBA, SOAP tried to solve every problem for everyone and ended up being optimal for no one.
SOAP and WSDL
I used SOAP (Simple Object Access Protocol) and WSDL (Web Services Description Language) on a number of projects in early 2000s that emerged as the standard for web services. The pitch: XML-based, platform-neutral, and “simple.” Here’s a WSDL definition:
You can look at all that XML overhead! A simple request became hundreds of bytes of markup. As SOAP was designed by committee (IBM, Oracle, Microsoft), it tried to solve every possible enterprise problem: transactions, security, reliability, routing, orchestration. I learned that simplicity beats features and SOAP collapsed under its own weight.
Java Servlets and Filters
With Java 1.1, it added support for Servlets that provided a much better model than CGI. Instead of spawning a process per request, servlets were Java classes instantiated once and reused across requests:
You could chain filters for compression, logging, transformation, rate limiting with clean separation of concerns without touching business logic. I previously had experienced with CORBA interceptors for injecting cross-cutting business logic and the filter pattern solved similar cross-cutting concerns problem. This pattern would reappear in service meshes and API gateways.
Enterprise Java Beans
I used Enterprise Java Beans (EJB) in late 1990s and early 2000s that attempted to make distributed objects transparent. Its key idea was that use regular Java objects and let the application server handle all the distribution, persistence, transactions, and security. Here’s what an EJB 2.x entity bean looked like:
// Remote interface
public interface Customer extends EJBObject {
String getName() throws RemoteException;
void setName(String name) throws RemoteException;
double getBalance() throws RemoteException;
void setBalance(double balance) throws RemoteException;
}
// Home interface
public interface CustomerHome extends EJBHome {
Customer create(Integer id, String name) throws CreateException, RemoteException;
Customer findByPrimaryKey(Integer id) throws FinderException, RemoteException;
}
// Bean implementation
public class CustomerBean implements EntityBean {
private Integer id;
private String name;
private double balance;
public String getName() { return name; }
public void setName(String name) { this.name = name; }
public double getBalance() { return balance; }
public void setBalance(double balance) { this.balance = balance; }
// Container callbacks
public void ejbActivate() {}
public void ejbPassivate() {}
public void ejbLoad() {}
public void ejbStore() {}
public void setEntityContext(EntityContext ctx) {}
public void unsetEntityContext() {}
public Integer ejbCreate(Integer id, String name) {
this.id = id;
this.name = name;
this.balance = 0.0;
return null;
}
public void ejbPostCreate(Integer id, String name) {}
}
The N+1 Selects Problem and Network Fallacy
The fatal flaw: EJB pretended network calls were free. I watched teams write code like this:
CustomerHome home = // ... lookup
Customer customer = home.findByPrimaryKey(customerId);
// Each getter is a remote call!
String name = customer.getName(); // Network call
double balance = customer.getBalance(); // Network call
Worse, I saw code that made remote calls in loops:
Collection customers = home.findAll();
double totalBalance = 0.0;
for (Customer customer : customers) {
// Remote call for EVERY iteration!
totalBalance += customer.getBalance();
}
This violated the first Fallacy of Distributed Computing: The network is reliable. It’s also not zero latency. What looked like simple property access actually made HTTP calls to a remote server. I had previously built distributed and parallel applications, so I understood network latency. But it blindsided most developers because EJB deliberately hid it.
I learned that you can’t hide distribution. Network calls are fundamentally different from local calls. Latency, failure modes, and semantics are different. Transparency is a lie.
REST Standard
Before REST became mainstream, I experimented with “Plain Old XML” (POX) over HTTP by just sending XML documents via HTTP POST without all the SOAP ceremony:
import requests
import xml.etree.ElementTree as ET
# Create XML request
root = ET.Element('getCustomer')
ET.SubElement(root, 'customerId').text = '12345'
xml_data = ET.tostring(root, encoding='utf-8')
# Send HTTP POST
response = requests.post(
'http://api.example.com/customer',
data=xml_data,
headers={'Content-Type': 'application/xml'}
)
# Parse response
response_tree = ET.fromstring(response.content)
name = response_tree.find('name').text
This was simpler than SOAP, but still ad-hoc. Then REST (Representational State Transfer), based on Roy Fielding’s 2000 dissertation offered a principled approach:
Use HTTP methods semantically (GET, POST, PUT, DELETE)
Resources have URLs
Stateless communication
Hypermedia as the engine of application state (HATEOAS)
Here’s a RESTful API in Python with Flask:
from flask import Flask, jsonify, request
app = Flask(__name__)
# In-memory data store
customers = {
'12345': {'id': '12345', 'name': 'John Smith', 'balance': 5000.00}
}
@app.route('/customers/<customer_id>', methods=['GET'])
def get_customer(customer_id):
customer = customers.get(customer_id)
if customer:
return jsonify(customer), 200
return jsonify({'error': 'Customer not found'}), 404
@app.route('/customers', methods=['POST'])
def create_customer():
data = request.get_json()
customer_id = data['id']
customers[customer_id] = data
return jsonify(data), 201
@app.route('/customers/<customer_id>', methods=['PUT'])
def update_customer(customer_id):
if customer_id not in customers:
return jsonify({'error': 'Customer not found'}), 404
data = request.get_json()
customers[customer_id].update(data)
return jsonify(customers[customer_id]), 200
@app.route('/customers/<customer_id>', methods=['DELETE'])
def delete_customer(customer_id):
if customer_id in customers:
del customers[customer_id]
return '', 204
return jsonify({'error': 'Customer not found'}), 404
if __name__ == '__main__':
app.run(debug=True)
In practice, most APIs called “REST” weren’t truly RESTful and didn’t implement HATEOAS or use HTTP status codes correctly. But even “REST-ish” APIs were far simpler than SOAP. Key lesson I leared was that REST succeeded because it built on HTTP, something every platform already supported. No new protocols, no complex tooling. Just URLs, HTTP verbs, and JSON.
JSON Replaces XML
With adoption of REST, I saw a decline of XML Web Services (JAX-WS) and I used JAX-RS for REST services that supported JSON payload. XML required verbose markup:
You have to encode references manually, unlike some XML schemas that support IDREF.
Erlang/OTP
I learned about actor model in college and built a framework based on actors and Linda memory model. In the mid-2000s, I encountered Erlang that used actors for building distributed systems. Erlang was designed in the 1980s at Ericsson for building telecom switches and is based on following design:
“Let it crash” philosophy
No shared memory between processes
Lightweight processes (not OS threads—Erlang processes)
If a process crashed, the supervisor automatically restarted it and the system self-healed. A key lesson I learned from actor model and Erlang was that a shared mutable state is the enemy. Message passing with isolated state is simpler, more reliable, and easier to reason about. Today, AWS Lambda, Azure Durable Functions, and frameworks like Akka all embrace the Actor model.
Distributed Erlang
Erlang made distributed computing almost trivial. Processes on different nodes communicated identically to local processes:
% On node1@host1
RemotePid = spawn('node2@host2', module, function, [args]),
RemotePid ! {message, data}.
% On node2@host2 - receives the message
receive
{message, Data} ->
io:format("Received: ~p~n", [Data])
end.
The VM handled all the complexity of node discovery, connection management, and message routing. Today’s serverless functions are actors and kubernetes pods are supervised processes.
Asynchronous Messaging
As systems grew more complex, asynchronous messaging became essential. I worked extensively with Oracle Tuxedo, IBM MQSeries, WebLogic JMS, WebSphere MQ, and later ActiveMQ, MQTT / AMQP, ZeroMQ and RabbitMQ primarily for inter-service communication and asynchronous processing. Here’s a JMS producer in Java:
import javax.jms.*;
import javax.naming.*;
public class OrderConsumer implements MessageListener {
public static void main(String[] args) throws Exception {
Context ctx = new InitialContext();
ConnectionFactory factory =
(ConnectionFactory) ctx.lookup("ConnectionFactory");
Queue queue = (Queue) ctx.lookup("OrderQueue");
Connection connection = factory.createConnection();
Session session = connection.createSession(
false, Session.AUTO_ACKNOWLEDGE);
MessageConsumer consumer = session.createConsumer(queue);
consumer.setMessageListener(new OrderConsumer());
connection.start();
System.out.println("Waiting for messages...");
Thread.sleep(Long.MAX_VALUE); // Keep running
}
public void onMessage(Message message) {
try {
TextMessage textMessage = (TextMessage) message;
System.out.println("Received order: " +
textMessage.getText());
// Process order
processOrder(textMessage.getText());
} catch (JMSException e) {
e.printStackTrace();
}
}
private void processOrder(String orderJson) {
// Business logic here
}
}
Asynchronous messaging is essential for building resilient, scalable systems. It decouples producers from consumers, provides natural backpressure, and enables event-driven architectures.
Spring Framework and Aspect-Oriented Programming
In early 2000, I used aspect oriented programming (AOP) to inject cross cutting concerns like logging, security, monitoring, etc. Here is a typical example:
@Aspect
@Component
public class LoggingAspect {
private static final Logger logger =
LoggerFactory.getLogger(LoggingAspect.class);
@Before("execution(* com.example.service.*.*(..))")
public void logBefore(JoinPoint joinPoint) {
logger.info("Executing: " +
joinPoint.getSignature().getName());
}
@AfterReturning(
pointcut = "execution(* com.example.service.*.*(..))",
returning = "result")
public void logAfterReturning(JoinPoint joinPoint, Object result) {
logger.info("Method " +
joinPoint.getSignature().getName() +
" returned: " + result);
}
@Around("@annotation(com.example.Monitored)")
public Object measureTime(ProceedingJoinPoint joinPoint)
throws Throwable {
long start = System.currentTimeMillis();
Object result = joinPoint.proceed();
long time = System.currentTimeMillis() - start;
logger.info(joinPoint.getSignature().getName() +
" took " + time + " ms");
return result;
}
}
I later adopted Spring Framework that revolutionized Java development with dependency injection and aspect-oriented programming (AOP):
// Spring configuration
@Configuration
public class AppConfig {
@Bean
public CustomerService customerService() {
return new CustomerServiceImpl(customerRepository());
}
@Bean
public CustomerRepository customerRepository() {
return new DatabaseCustomerRepository(dataSource());
}
@Bean
public DataSource dataSource() {
DriverManagerDataSource ds = new DriverManagerDataSource();
ds.setDriverClassName("com.mysql.jdbc.Driver");
ds.setUrl("jdbc:mysql://localhost/mydb");
return ds;
}
}
// Service class
@Service
public class CustomerServiceImpl implements CustomerService {
private final CustomerRepository repository;
@Autowired
public CustomerServiceImpl(CustomerRepository repository) {
this.repository = repository;
}
@Transactional
public void updateBalance(String customerId, double newBalance) {
Customer customer = repository.findById(customerId);
customer.setBalance(newBalance);
repository.save(customer);
}
}
Spring Remoting
Spring added its own remoting protocols. HTTP Invoker serialized Java objects over HTTP:
// Server configuration
@Configuration
public class ServerConfig {
@Bean
public HttpInvokerServiceExporter customerService() {
HttpInvokerServiceExporter exporter =
new HttpInvokerServiceExporter();
exporter.setService(customerServiceImpl());
exporter.setServiceInterface(CustomerService.class);
return exporter;
}
}
// Client configuration
@Configuration
public class ClientConfig {
@Bean
public HttpInvokerProxyFactoryBean customerService() {
HttpInvokerProxyFactoryBean proxy =
new HttpInvokerProxyFactoryBean();
proxy.setServiceUrl("http://localhost:8080/customer");
proxy.setServiceInterface(CustomerService.class);
return proxy;
}
}
I learned that AOP addressed cross-cutting concerns elegantly for monoliths. But in microservices, these concerns moved to the infrastructure layer like service meshes, API gateways, and sidecars.
Proprietary Protocols
When working for large companies like Amazon, I encountered Amazon Coral, which is a proprietary RPC framework influenced by CORBA. Coral used an IDL to define service interfaces and supported multiple languages:
The IDL compiler generated client and server code for Java, C++, and other languages. Coral handled serialization, versioning, and service discovery. When I later worked for AWS, I used Smithy that was successor Coral, which Amazon open-sourced. Here is a similar example of a Smithy contract:
I learned IDL-first design remains valuable. Smithy learned from CORBA, Protocol Buffers, and Thrift.
Long Polling, WebSockets, and Real-Time
In late 2000s, I built real-time applications for streaming financial charts and technical data. I used long polling where the client made a request that the server held open until data was available:
// Client-side long polling
function pollServer() {
fetch('/api/events')
.then(response => response.json())
.then(data => {
console.log('Received event:', data);
updateUI(data);
// Immediately poll again
pollServer();
})
.catch(error => {
console.error('Polling error:', error);
// Retry after delay
setTimeout(pollServer, 5000);
});
}
pollServer();
Server-side (Node.js):
const express = require('express');
const app = express();
let pendingRequests = [];
app.get('/api/events', (req, res) => {
// Hold request open
pendingRequests.push(res);
// Timeout after 30 seconds
setTimeout(() => {
const index = pendingRequests.indexOf(res);
if (index !== -1) {
pendingRequests.splice(index, 1);
res.json({ type: 'heartbeat' });
}
}, 30000);
});
// When an event occurs
function broadcastEvent(event) {
pendingRequests.forEach(res => {
res.json(event);
});
pendingRequests = [];
}
WebSockets
I also used WebSockets for real time applications that supported true bidirectional communication. However, earlier browsers didn’t fully support them so I used long polling as a fallback when websockets were not supported:
// Server (Node.js with ws library)
const WebSocket = require('ws');
const wss = new WebSocket.Server({ port: 8080 });
wss.on('connection', (ws) => {
console.log('Client connected');
// Send initial data
ws.send(JSON.stringify({
type: 'INIT',
data: getInitialData()
}));
// Handle messages
ws.on('message', (message) => {
const msg = JSON.parse(message);
if (msg.type === 'SUBSCRIBE') {
subscribeToSymbol(ws, msg.symbol);
}
});
ws.on('close', () => {
console.log('Client disconnected');
unsubscribeAll(ws);
});
});
// Stream live data
function streamPriceUpdate(symbol, price) {
wss.clients.forEach((client) => {
if (client.readyState === WebSocket.OPEN) {
if (isSubscribed(client, symbol)) {
client.send(JSON.stringify({
type: 'PRICE_UPDATE',
symbol: symbol,
price: price,
timestamp: Date.now()
}));
}
}
});
}
I learned that different problems need different protocols. REST works for request-response. WebSockets excel for real-time bidirectional communication.
Vert.x and Hazelcast for High-Performance Streaming
For a production streaming chart system handling high-volume market data, I used Vert.x with Hazelcast. Vert.x is a reactive toolkit built on Netty that excels at handling thousands of concurrent connections with minimal resources. Hazelcast provided distributed caching and coordination across multiple Vert.x instances. Market data flowed into Hazelcast distributed topics, Vert.x instances subscribed to these topics and pushed updates to connected WebSocket clients. If WebSocket wasn’t supported, we fell back to long polling automatically.
import io.vertx.core.Vertx;
import io.vertx.core.http.HttpServer;
import io.vertx.core.http.ServerWebSocket;
import com.hazelcast.core.Hazelcast;
import com.hazelcast.core.HazelcastInstance;
import com.hazelcast.core.ITopic;
import com.hazelcast.core.Message;
import com.hazelcast.core.MessageListener;
import java.util.concurrent.ConcurrentHashMap;
import java.util.Set;
public class MarketDataServer {
private final Vertx vertx;
private final HazelcastInstance hazelcast;
private final ConcurrentHashMap<String, Set<ServerWebSocket>> subscriptions;
public MarketDataServer() {
this.vertx = Vertx.vertx();
this.hazelcast = Hazelcast.newHazelcastInstance();
this.subscriptions = new ConcurrentHashMap<>();
// Subscribe to market data topic
ITopic<MarketData> topic = hazelcast.getTopic("market-data");
topic.addMessageListener(new MessageListener<MarketData>() {
public void onMessage(Message<MarketData> message) {
broadcastToSubscribers(message.getMessageObject());
}
});
}
public void start() {
HttpServer server = vertx.createHttpServer();
server.webSocketHandler(ws -> {
String path = ws.path();
if (path.startsWith("/stream/")) {
String symbol = path.substring(8);
handleWebSocketConnection(ws, symbol);
} else {
ws.reject();
}
});
// Long polling fallback
server.requestHandler(req -> {
if (req.path().startsWith("/poll/")) {
String symbol = req.path().substring(6);
handleLongPolling(req, symbol);
}
});
server.listen(8080, result -> {
if (result.succeeded()) {
System.out.println("Market data server started on port 8080");
}
});
}
private void handleWebSocketConnection(ServerWebSocket ws, String symbol) {
subscriptions.computeIfAbsent(symbol, k -> ConcurrentHashMap.newKeySet())
.add(ws);
ws.closeHandler(v -> {
Set<ServerWebSocket> sockets = subscriptions.get(symbol);
if (sockets != null) {
sockets.remove(ws);
}
});
// Send initial snapshot from Hazelcast cache
IMap<String, MarketData> cache = hazelcast.getMap("market-snapshot");
MarketData data = cache.get(symbol);
if (data != null) {
ws.writeTextMessage(data.toJson());
}
}
private void handleLongPolling(HttpServerRequest req, String symbol) {
String lastEventId = req.getParam("lastEventId");
// Hold request until data available or timeout
long timerId = vertx.setTimer(30000, id -> {
req.response()
.putHeader("Content-Type", "application/json")
.end("{\"type\":\"heartbeat\"}");
});
// Register one-time listener
subscriptions.computeIfAbsent(symbol + ":poll",
k -> ConcurrentHashMap.newKeySet())
.add(new PollHandler(req, timerId));
}
private void broadcastToSubscribers(MarketData data) {
String symbol = data.getSymbol();
// WebSocket subscribers
Set<ServerWebSocket> sockets = subscriptions.get(symbol);
if (sockets != null) {
String json = data.toJson();
sockets.forEach(ws -> {
if (!ws.isClosed()) {
ws.writeTextMessage(json);
}
});
}
// Update Hazelcast cache for new subscribers
IMap<String, MarketData> cache = hazelcast.getMap("market-snapshot");
cache.put(symbol, data);
}
public static void main(String[] args) {
new MarketDataServer().start();
}
}
Publishing market data to Hazelcast from data feed:
public class MarketDataPublisher {
private final HazelcastInstance hazelcast;
public void publishUpdate(String symbol, double price, long volume) {
MarketData data = new MarketData(symbol, price, volume,
System.currentTimeMillis());
// Publish to topic - all Vert.x instances receive it
ITopic<MarketData> topic = hazelcast.getTopic("market-data");
topic.publish(data);
}
}
Hazelcast Distribution: Market data shared across multiple Vert.x instances without a central message broker
Horizontal Scaling: Adding Vert.x instances automatically joined the Hazelcast cluster
Low Latency: Sub-millisecond message propagation within the cluster
Automatic Fallback: Clients detected WebSocket support; older browsers used long polling
Facebook Thrift and Google Protocol Buffers
I experimented with Facebook Thrift and Google Protocol Buffers that provided IDL-based RPC with multiple protocols: Here is an example of Protocol Buffers:
Python server with gRPC (which uses Protocol Buffers):
import grpc
from concurrent import futures
import customer_pb2
import customer_pb2_grpc
class CustomerServicer(customer_pb2_grpc.CustomerServiceServicer):
def GetCustomer(self, request, context):
return customer_pb2.Customer(
customer_id=request.customer_id,
name="John Doe",
balance=5000.00
)
def UpdateBalance(self, request, context):
print(f"Updating balance for {request.customer_id} " +
f"to {request.new_balance}")
return customer_pb2.UpdateBalanceResponse(success=True)
def ListCustomers(self, request, context):
customers = [
customer_pb2.Customer(customer_id=1, name="Alice", balance=1000),
customer_pb2.Customer(customer_id=2, name="Bob", balance=2000),
]
return customer_pb2.CustomerList(customers=customers)
def serve():
server = grpc.server(futures.ThreadPoolExecutor(max_workers=10))
customer_pb2_grpc.add_CustomerServiceServicer_to_server(
CustomerServicer(), server)
server.add_insecure_port('[::]:50051')
server.start()
print("Server started on port 50051")
server.wait_for_termination()
if __name__ == '__main__':
serve()
I learned that binary protocols offer significant efficiency gains. JSON is human-readable and convenient for debugging, but in high-performance scenarios, binary protocols like Protocol Buffers reduce payload size and serialization overhead.
Serverless and Lambda: Functions as a Service
Around 2015, AWS Lambda introduced serverless computing where you wrote functions, and AWS handled all the infrastructure:
Serverless was powerful with no servers to manage, automatic scaling, pay-per-invocation pricing. It felt like the Actor model I’d worked for my research that offered small, stateless, event-driven functions.
However, I also encountered several problems with serverless:
Cold starts: First invocation could be slow (though it has improved with recent updates)
Timeouts: Functions had maximum execution time (15 minutes for Lambda)
State management: Functions were stateless; you needed external state stores
Orchestration: Coordinating multiple functions was complex
The ping-pong anti-pattern emerged where Lambda A calls Lambda B, which calls Lambda C, which calls Lambda D. This created hard-to-debug systems with unpredictable costs. AWS Step Functions and Azure Durable Functions addressed orchestration:
gRPC had one major gotcha in Kubernetes: connection persistence breaks load balancing. I documented this exhaustively in my blog post The Complete Guide to gRPC Load Balancing in Kubernetes and Istio. HTTP/2 multiplexes multiple requests over a single TCP connection. Once that connection is established to one pod, all requests go there. Kubernetes Service load balancing happens at L4 (TCP), so it doesn’t see individual gRPC calls and it only sees one connection. I used Istio’s Envoy sidecar, which operates at L7 and routes each gRPC call independently:
I learned that modern protocols solve old problems but introduce new ones. gRPC is excellent, but you must understand how it interacts with infrastructure. Production systems require deep integration between application protocol and deployment environment.
Modern Messaging and Streaming
I have been using Apache Kafka for many years that transformed how we think about data. It’s not just a message queue instead it’s a distributed commit log:
from kafka import KafkaProducer, KafkaConsumer
import json
# Producer
producer = KafkaProducer(
bootstrap_servers='localhost:9092',
value_serializer=lambda v: json.dumps(v).encode('utf-8')
)
order = {
'order_id': '12345',
'customer_id': '67890',
'amount': 99.99,
'timestamp': time.time()
}
producer.send('orders', value=order)
producer.flush()
# Consumer
consumer = KafkaConsumer(
'orders',
bootstrap_servers='localhost:9092',
auto_offset_reset='earliest',
value_deserializer=lambda m: json.loads(m.decode('utf-8')),
group_id='order-processors'
)
for message in consumer:
order = message.value
print(f"Processing order: {order['order_id']}")
# Process order
Kafka’s provided:
Durability: Messages are persisted to disk
Replayability: Consumers can reprocess historical events
Partitioning: Horizontal scalability through partitions
Consumer groups: Multiple consumers can process in parallel
Key Lesson: Event-driven architectures enable loose coupling and temporal decoupling. Systems can be rebuilt from the event log. This is Event Sourcing—a powerful pattern that Kafka makes practical at scale.
Agentic RPC: MCP and Agent-to-Agent Protocol
Over the last year, I have been building Agentic AI applications using Model Context Protocol (MCP) and more recently Agent-to-Agent (A2A) protocol. Both use JSON-RPC 2.0 underneath. After decades of RPC evolution, from Sun RPC to CORBA to gRPC, we’ve come full circle to JSON-RPC for AI agents. I recently built a daily minutes assistant that aggregates information from multiple sources into a morning briefing. After decades of RPC evolution, from Sun RPC to CORBA to gRPC, it has come full circle to JSON-RPC for AI agents.
Service Discovery
A2A immediately reminded me of Sun’s Network Information Service (NIS), originally called Yellow Pages that I used in early 1990s. NIS provided a centralized directory service for Unix systems to look up user accounts, host names, and configuration data across a network. I saw this pattern repeated throughout the decades:
CORBA Naming Service (1990s): Objects registered themselves with a hierarchical naming service, and clients discovered them by name
JINI (late 1990s): Services advertised themselves via multicast, and clients discovered them through lookup registrars (as I described earlier in the JINI section)
UDDI (2000s): Universal Description, Discovery, and Integration for web services—a registry where SOAP services could be published and discovered
Consul, Eureka, etcd (2010s): Modern service discovery for microservices
Kubernetes DNS/Service Discovery (2010s-present): Built-in service registry and DNS-based discovery
Model Context Protocol (MCP)
MCP lets AI agents discover and invoke tools provided by servers. I recently built a daily minutes assistant that aggregates information from multiple sources into a morning briefing. Here’s the MCP server that exposes tools to the AI agent:
from mcp.server import Server
import mcp.types as types
from typing import Any
import asyncio
class DailyMinutesServer:
def __init__(self):
self.server = Server("daily-minutes")
self.setup_handlers()
def setup_handlers(self):
@self.server.list_tools()
async def handle_list_tools() -> list[types.Tool]:
return [
types.Tool(
name="get_emails",
description="Fetch recent emails from inbox",
inputSchema={
"type": "object",
"properties": {
"hours": {
"type": "number",
"description": "Hours to look back"
},
"limit": {
"type": "number",
"description": "Max emails to fetch"
}
}
}
),
types.Tool(
name="get_hackernews",
description="Fetch top Hacker News stories",
inputSchema={
"type": "object",
"properties": {
"limit": {
"type": "number",
"description": "Number of stories"
}
}
}
),
types.Tool(
name="get_rss_feeds",
description="Fetch latest RSS feed items",
inputSchema={
"type": "object",
"properties": {
"feed_urls": {
"type": "array",
"items": {"type": "string"}
}
}
}
),
types.Tool(
name="get_weather",
description="Get current weather forecast",
inputSchema={
"type": "object",
"properties": {
"location": {"type": "string"}
}
}
)
]
@self.server.call_tool()
async def handle_call_tool(
name: str,
arguments: dict[str, Any]
) -> list[types.TextContent]:
if name == "get_emails":
result = await email_connector.fetch_recent(
hours=arguments.get("hours", 24),
limit=arguments.get("limit", 10)
)
elif name == "get_hackernews":
result = await hn_connector.fetch_top_stories(
limit=arguments.get("limit", 10)
)
elif name == "get_rss_feeds":
result = await rss_connector.fetch_feeds(
feed_urls=arguments["feed_urls"]
)
elif name == "get_weather":
result = await weather_connector.get_forecast(
location=arguments["location"]
)
else:
raise ValueError(f"Unknown tool: {name}")
return [types.TextContent(
type="text",
text=json.dumps(result, indent=2)
)]
Each connector is a simple async module. Here’s the Hacker News connector:
import aiohttp
from typing import List, Dict
class HackerNewsConnector:
BASE_URL = "https://hacker-news.firebaseio.com/v0"
async def fetch_top_stories(self, limit: int = 10) -> List[Dict]:
async with aiohttp.ClientSession() as session:
# Get top story IDs
async with session.get(f"{self.BASE_URL}/topstories.json") as resp:
story_ids = await resp.json()
# Fetch details for top N stories
stories = []
for story_id in story_ids[:limit]:
async with session.get(
f"{self.BASE_URL}/item/{story_id}.json"
) as resp:
story = await resp.json()
stories.append({
"title": story.get("title"),
"url": story.get("url"),
"score": story.get("score"),
"by": story.get("by"),
"time": story.get("time")
})
return stories
RSS and weather connectors follow the same pattern—simple, focused modules that the MCP server orchestrates.
JSON-RPC Under the Hood
MCP is that it’s just JSON-RPC 2.0 over stdio or HTTP. Here’s what a tool call looks like on the wire:
Agent synthesizes everything into a concise morning briefing
The AI decides which tools to call, in what order, based on the user’s preferences. I don’t hardcode the workflow.
Agent-to-Agent Protocol (A2A)
While MCP focuses on tool calling, A2A addresses agent-to-agent discovery and communication. It’s the modern equivalent of NIS/Yellow Pages for agents. Agents register their capabilities in a directory, and other agents discover and invoke them. A2A also uses JSON-RPC 2.0, but adds a discovery layer. Here’s how an agent registers itself:
Though, I appreciate the simplicity of MCP and A2A but here’s what worries me: both protocols largely ignore decades of hard-won lessons about security. The Salesloft breach in 2024 showed exactly what happens: their AI chatbot stored authentication tokens for hundreds of services. MCP and A2A give us standard protocols for tool calling and agent coordination, which is valuable. But they create a false sense of security while ignoring fundamentals we solved decades ago:
Authentication: How do we verify an agent’s identity?
Authorization: What capabilities should this agent have access to?
Credential rotation: How do we handle token expiration and renewal?
Observability: How do we trace agent interactions for debugging and auditing?
Principle of least privilege: How do we ensure agents only access what they need?
Rate limiting: How do we prevent a misbehaving agent from overwhelming services?
The community needs to address this before A2A and MCP see widespread enterprise adoption.
Lessons Learned
1. Complexity is the Enemy
Every failed technology I’ve used failed because of complexity. CORBA, SOAP, EJB—they all collapsed under their own weight. Successful technologies like REST, gRPC, Kafka focused on doing one thing well.
Implication: Be suspicious of solutions that try to solve every problem. Prefer composable, focused tools.
2. Network Calls Are Expensive
The first Fallacy of Distributed Computing haunts us still: The network is not reliable. It’s also not zero latency, infinite bandwidth, or secure. I’ve watched this lesson be relearned in every generation:
EJB entity beans made chatty network calls
Microservices make chatty REST calls
GraphQL makes chatty database queries
Implication: Design APIs to minimize round trips. Batch operations. Cache aggressively. Monitor network latency religiously. (See my blog on fault tolerance in microservices for details.)
3. Statelessness Scales
Stateless services scale horizontally. But real applications need state—session data, shopping carts, user preferences. The solution isn’t to make services stateful instead it’s to externalize state:
Session stores (Redis, Memcached)
Databases (PostgreSQL, DynamoDB)
Event logs (Kafka)
Distributed caches
Implication: Keep service logic stateless. Push state to specialized systems designed for it.
4. The Actor Model Is Underappreciated
My research with actors and Linda memory model convinced me that the Actor model simplifies concurrent and distributed systems. Today’s serverless functions are essentially actors. Frameworks like Akka, Orleans, and Dapr embrace it. Actors eliminate shared mutable shared state, which the source of most concurrency bugs.
Implication: For event-driven systems, consider Actor-based frameworks. They map naturally to distributed problems.
5. Observability
Modern distributed systems require extensive instrumentation. You need:
Structured logging with correlation IDs
Metrics for performance and health
Distributed tracing to follow requests across services
Alarms with proper thresholds
Implication: Instrument your services from day one. Observability is infrastructure, not a nice-to-have. (See my blog posts on fault tolerance and load shedding for specific metrics.)
6. Throttling and Load Shedding
Every production system eventually faces traffic spikes or DDoS attacks. Without throttling and load shedding, your system will collapse. Key techniques:
Rate limiting by client/user/IP
Admission control based on queue depth
Circuit breakers to fail fast
Backpressure to slow down producers
Implication: Build throttling and load shedding into your architecture early. They’re harder to retrofit. (See my comprehensive blog post on this topic.)
7. Idempotency
Network failures mean requests may be retried. If your operations aren’t idempotent, you’ll process payments twice, create duplicate orders, and corrupt data (See my blog on idempotency topic). Make operations idempotent:
Use idempotency keys
Check if operation already succeeded
Design APIs to be safely retryable
Implication: Every non-read operation should be idempotent. It saves you from a world of hurt.
8. External and Internal APIs Should Differ
I have learned that external APIs need a good UX and developer empathy so that APIs are intuitive, consistent, well-documented. Internal APIs can optimize for performance, reliability, and operational needs. Don’t expose your internal architecture to external consumers. Use API gateways to translate between external contracts and internal services.
Implication: Design external APIs for developers using them. Design internal APIs for operational excellence.
9. Standards Beat Proprietary Solutions
Novell IPX failed because it was proprietary. Sun RPC succeeded as an open standard. REST thrived because it built on HTTP. gRPC uses open standards (HTTP/2, Protocol Buffers).
Implication: Prefer open standards. If you must use proprietary tech, understand the exit strategy.
10. Developer Experience Matters
Technologies with great developer experience get adopted. Java succeeded because it was easier than C++. REST beat SOAP because it was simpler. Kubernetes won because it offered a powerful abstraction.
Implication: Invest in developer tools, documentation, and ergonomics. Friction kills momentum.
Upcoming Trends
WebAssembly: The Next Runtime
WebAssembly (Wasm) is emerging as a universal runtime. Code written in Rust, Go, C, or AssemblyScript compiles to Wasm and runs anywhere. Platforms like wasmCloud, Fermyon, and Lunatic are building Actor-based systems on Wasm. Combined with the Component Model and WASI (WebAssembly System Interface), Wasm offers near-native performance, strong sandboxing, and portability. It might replace Docker containers for some workloads. Solomon Hykes, creator of Docker, famously said:
“If WASM+WASI existed in 2008, we wouldn’t have needed to create Docker. That’s how important it is. WebAssembly on the server is the future of computing. A standardized system interface was the missing link. Let’s hope WASI is up to the task!” — Solomon Hykes, March 2019
WebAssembly isn’t ready yet. Critical gaps:
WASI maturity: Still evolving (Preview 2 in development)
Async I/O: Limited compared to native runtimes
Database drivers: Many don’t support WASM
Networking: WASI sockets still experimental
Ecosystem tooling: Debugging, profiling still primitive
Service Meshes
Istio, Linkerd, Dapr move cross-cutting concerns out of application code:
Authentication/authorization
Rate limiting
Circuit breaking
Retries with exponential backoff
Distributed tracing
Metrics collection
Tradeoff: Complexity shifts from application code to infrastructure. Teams need deep Kubernetes and service mesh expertise.
The Edge Is Growing
Edge computing brings computation closer to users. CDNs like Cloudflare Workers and Fastly Compute@Edge run code globally with single-digit millisecond latency. This requires new thinking like eventual consistency, CRDTs (Conflict-free Replicated Data Types), and geo-distributed state management.
AI Agents and Multi-Agent Systems
I’m currently building agentic AI systems using LangGraph, RAG, and MCP. These are inherently distributed and agents communicate asynchronously, maintain local state, and coordinate through message passing. It’s the Actor model again.
What’s Missing
Despite all this progress, we still struggle with:
Distributed transactions: Two-phase commit doesn’t scale; SAGA patterns are complex
Testing distributed systems: Mocking services, simulating failures, and reproducing production bugs remain hard. I have written a number of tools for mock testing.
Observability at scale: Tracing millions of requests generates too much data
Cost management: Cloud bills spiral as systems grow
Cognitive load: Modern systems require expertise in dozens of technologies
Conclusion
I’ve been writing network code for decades and have used dozens of protocols, frameworks, and paradigms. Here is what I have learned:
Design for Failure from Day One (Systems built with circuit breakers, retries, timeouts, and graceful degradation from the start).
Other tips from evolution of remote services include:
Design systems as message-passing actors from the start. Whether that’s Erlang processes, Akka actors, Orleans grains, or Lambda functions—embrace isolated state and message passing.
Invest in Observability with structured logging with correlation IDs, instrumented metrics, distributed tracing and alarms.
Separate External and Internal APIs. Use REST or GraphQL for external APIs (with versioning) and use gRPC or Thrift for internal communication (efficient).
Build Throttling and Load Shedding by rate limiting by client/user/IP at the edge and implement admission control at the service level (See my blog on Effective Load Shedding and Throttling).
Make Everything Idempotent as networks fail and requests get retried. Use idempotency keys for all mutations.
Choose Boring Technology (See Choose Boring Technology). For your core infrastructure, use proven tech (PostgreSQL, Redis, Kafka).
Test for Failure. Most code only handles the happy path. Production is all about unhappy paths.
Make chaos engineering part of CI/CD and use property-based testing (See my blog on property-based testing).
The technologies change like mainframes to serverless, Assembly to Go, CICS to Kubernetes. But the underlying principles remain constant. We oscillate between extremes:
Each swing teaches us something. CORBA was too complex, but IDL-first design is valuable. REST was liberating, but binary protocols are more efficient. Microservices enable agility, but operational complexity explodes. The sweet spot is usually in the middle. Modular monoliths with clear boundaries. REST for external APIs, gRPC for internal communication. Some synchronous calls, some async messaging.
Here are a few trends that I see becoming prevalent:
WebAssembly may replace containers for some workloads: Faster startup, better security with platforms like wasmCloud and Fermyon.
Service meshes are becoming invisible: Currently they are too complex. Ambient mesh (no sidecars) and eBPF-based routing are gaining wider adoption.
The Actor model will eat the world: Serverless functions are actors and durable functions are actor orchestration.
Edge computing will force new patterns: We can’t rely on centralized state and may need CRDTs and eventual consistency.
AI agents will need distributed coordination. Multi-agent systems = distributed systems and may need message passing between agents.
The best engineers don’t just learn the latest framework, they study the history, understand the trade-offs, and recognize when old ideas solve new problems. The future of distributed systems won’t be built by inventing entirely new paradigms instead it’ll be built by taking the best ideas from the past, learning from the failures, and applying them with better tools.
TL;DR: Tested open-source LLM serving (vLLM) on GCP L4 GPUs. Achieved 93% cost savings vs OpenAI GPT-4, 100% routing accuracy, and 91% cache hit rates. Prototype proves feasibility; production requires 5-7 months additional work (security, HA, ops). All code at github.com/bhatti/vllm-tutorial.
Background
Last year, our CEO mandated “AI adoption” across the organization and everyone had access to LLMs through an internal portal that used Vertex AI. However, there was a little training or best practices. I saw engineers using the most expensive models for simple queries, no cost tracking, zero observability into what was being used, and no policies around data handling. People tried AI, built some demos and got mixed results.
This mirrors what’s happening across the industry. Recent research shows 95% of AI pilots fail at large companies, and McKinsey found 42% of companies abandoned generative AI projects citing “no significant bottom line impact.” The 5% that succeed do something fundamentally different: they treat AI as infrastructure requiring proper tooling, not just API access.
This experience drove me to explore better approaches. I built prototypes using vLLM and open-source tools, tested them on GCP L4 GPUs, and documented what actually works. This blog shares those findings with real code, benchmarks, and lessons from building production-ready AI infrastructure. Every benchmark ran on actual hardware (GCP L4 GPUs), every pattern emerged from solving real problems, and all code is available at github.com/bhatti/vllm-tutorial.
Why Hosted LLM Access Isn’t Enough
Even with managed services like Vertex AI or Bedrock, enterprise AI needs additional layers that most organizations overlook:
Cost Management
No intelligent routing between models (GPT-4 for simple definitions that Phi-2 could handle)
No per-user, per-team budgets or limits
No cost attribution or chargeback
Result: Unpredictable expenses, no accountability
Observability
Can’t track which prompts users send
Can’t identify failing queries or quality degradation
Can’t measure actual usage patterns
Result: Flying blind when issues occur
Security & Governance
Data flows through third-party infrastructure
No granular access controls beyond API keys
Limited audit trails for compliance
Result: Compliance gaps, security risks
Performance Control
Can’t deploy custom fine-tuned models
No A/B testing between models
Limited control over routing logic
Result: Vendor lock-in, inflexibility
The Solution: vLLM with Production Patterns
After evaluating options, I built prototypes using vLLM—a high-performance inference engine for running open-source LLMs (Llama, Mistral, Phi) on your infrastructure. Think of vLLM as NGINX for LLMs: battle-tested, optimized runtime that makes production deployments feasible.
Production error handling (retries, circuit breakers, fallbacks)
System Architecture
Here’s the complete system architecture I’ve built and tested:
Production AI requires three monitoring layers:
Layer 1: Infrastructure (Prometheus + Grafana)
GPU utilization, memory usage
Request rate, error rate, latency (P50, P95, P99)
Integration via /metrics endpoint that vLLM exposes
Grafana dashboards visualize trends and trigger alerts
Layer 2: Application Metrics
Time to First Token (TTFT), tokens per second
Cost per request, model distribution
Budget tracking (daily, monthly limits)
Custom Prometheus metrics embedded in application code
Layer 3: LLM Observability (Langfuse)
Full prompt/response history for debugging
Cost attribution per user/team
Quality tracking over time
Essential for understanding what users actually do
Here’s what I’ve built and tested:
Setting Up Your Environment: GCP L4 GPU Setup
Before we dive into the concepts, let’s get your environment ready. I’m using GCP L4 GPUs because they offer the best price/performance for this workload ($0.45/hour), but the code works on any CUDA-capable GPU.
# Test vLLM installation
python -c "import vllm; print(f'vLLM version: {vllm.__version__}')"
# Quick functionality test
python examples/01_basic_vllm.py
Expected output:
Loading model microsoft/phi-2...
Model loaded in 8.3 seconds
Generating response...
Generated 50 tokens in 987ms
Throughput: 41.5 tokens/sec
? vLLM is working!
Quick Start
Before we dive deep, let’s get something running:
Clone the repo:
git clone https://github.com/bhatti/vllm-tutorial.git
cd vllm-tutorial
If you have a GPU available:
# Follow setup instructions in README
python examples/01_basic_vllm.py
No GPU? Run the benchmarks locally:
# See the actual results from GCP L4 testing
cat benchmarks/results/01_throughput_results.json
from typing import Callable
from dataclasses import dataclass
import time
@dataclass
class RetryConfig:
"""Retry configuration"""
max_retries: int = 3
initial_delay: float = 1.0
max_delay: float = 60.0
exponential_base: float = 2.0
def retry_with_backoff(config: RetryConfig = RetryConfig()):
"""
Decorator: Retry with exponential backoff
Example:
@retry_with_backoff()
def generate_text(prompt):
return llm.generate(prompt)
"""
def decorator(func: Callable) -> Callable:
def wrapper(*args, **kwargs):
delay = config.initial_delay
for attempt in range(config.max_retries):
try:
return func(*args, **kwargs)
except Exception as e:
if attempt == config.max_retries - 1:
raise # Last attempt, re-raise
error_type = classify_error(e)
# Don't retry on invalid input
if error_type == ErrorType.INVALID_INPUT:
raise
print(f"?? Attempt {attempt + 1} failed: {error_type.value}")
print(f" Retrying in {delay:.1f}s...")
time.sleep(delay)
# Exponential backoff
delay = min(delay * config.exponential_base, config.max_delay)
raise RuntimeError(f"Failed after {config.max_retries} retries")
return wrapper
return decorator
# Usage
@retry_with_backoff(RetryConfig(max_retries=3, initial_delay=1.0))
def generate_with_retry(prompt: str):
"""Generate with automatic retry on failure"""
return llm.generate(prompt)
# This will retry up to 3 times with exponential backoff
result = generate_with_retry("Analyze earnings report")
Pattern 2: Circuit Breaker
When a service starts failing repeatedly, stop calling it:
from datetime import datetime, timedelta
from enum import Enum
class CircuitState(Enum):
CLOSED = "closed" # Normal operation
OPEN = "open" # Failing, reject requests
HALF_OPEN = "half_open" # Testing recovery
class CircuitBreaker:
"""
Circuit breaker for fault tolerance
Prevents cascading failures by stopping calls to
failing services
"""
def __init__(
self,
failure_threshold: int = 5,
timeout: int = 60,
expected_exception: type = Exception
):
self.failure_threshold = failure_threshold
self.timeout = timeout
self.expected_exception = expected_exception
self.failure_count = 0
self.last_failure_time = None
self.state = CircuitState.CLOSED
def call(self, func: Callable, *args, **kwargs):
"""Execute function with circuit breaker protection"""
if self.state == CircuitState.OPEN:
# Check if timeout elapsed
if datetime.now() - self.last_failure_time > timedelta(seconds=self.timeout):
self.state = CircuitState.HALF_OPEN
print("? Circuit breaker: HALF_OPEN (testing recovery)")
else:
raise RuntimeError("Circuit breaker OPEN - service unavailable")
try:
result = func(*args, **kwargs)
# Success - reset if recovering
if self.state == CircuitState.HALF_OPEN:
self.state = CircuitState.CLOSED
self.failure_count = 0
print("? Circuit breaker: CLOSED (service recovered)")
return result
except self.expected_exception as e:
self.failure_count += 1
self.last_failure_time = datetime.now()
if self.failure_count >= self.failure_threshold:
self.state = CircuitState.OPEN
print(f"? Circuit breaker: OPEN (threshold {self.failure_threshold} reached)")
raise
# Usage
circuit_breaker = CircuitBreaker(failure_threshold=5, timeout=60)
def generate_protected(prompt: str):
"""Generate with circuit breaker protection"""
return circuit_breaker.call(llm.generate, prompt)
# If llm.generate fails 5 times, circuit breaker opens
# Requests fail fast for 60 seconds
# Then one test request (half-open)
# If successful, normal operation resumes
This prevents:
Thundering herd problem
Resource exhaustion
Long timeouts on every request
Pattern 3: Rate Limiting
Protect your system from overload:
import time
class RateLimiter:
"""
Token bucket rate limiter
Limits requests per second to prevent overload
"""
def __init__(self, max_requests: int, time_window: float = 1.0):
self.max_requests = max_requests
self.time_window = time_window
self.tokens = max_requests
self.last_update = time.time()
def acquire(self, tokens: int = 1) -> bool:
"""Try to acquire tokens, return True if allowed"""
now = time.time()
elapsed = now - self.last_update
# Refill tokens based on elapsed time
self.tokens = min(
self.max_requests,
self.tokens + (elapsed / self.time_window) * self.max_requests
)
self.last_update = now
if self.tokens >= tokens:
self.tokens -= tokens
return True
else:
return False
def wait_for_token(self, tokens: int = 1):
"""Wait until token is available"""
while not self.acquire(tokens):
time.sleep(0.1)
# Usage
rate_limiter = RateLimiter(max_requests=100, time_window=1.0)
@app.post("/generate")
async def generate(request: GenerateRequest):
# Check rate limit
if not rate_limiter.acquire():
raise HTTPException(
status_code=429,
detail="Rate limit exceeded (100 req/sec)"
)
# Process request
result = llm.generate(request.prompt)
return result
Why this matters:
Prevents DoS (accidental or malicious)
Protects GPU from overload
Ensures fair usage
Pattern 4: Fallback Strategies
When primary fails, don’t just error—degrade gracefully:
def generate_with_fallback(prompt: str) -> str:
"""
Try multiple strategies before failing
Strategy 1: Primary model (Llama-3-8B)
Strategy 2: Cached response (if available)
Strategy 3: Simpler model (Phi-2)
Strategy 4: Template response
"""
# Try primary model
try:
return llm_primary.generate(prompt)
except Exception as e:
print(f"?? Primary model failed: {e}")
# Fallback 1: Check cache
cached_response = cache.get(prompt)
if cached_response:
print("? Returning cached response")
return cached_response
# Fallback 2: Try simpler model
try:
print("? Falling back to Phi-2")
return llm_simple.generate(prompt)
except Exception as e2:
print(f"?? Fallback model also failed: {e2}")
# Fallback 3: Template response
return (
"I apologize, but I'm unable to process your request right now. "
"Please try again in a few minutes, or contact support if the issue persists."
)
# User never sees "Internal Server Error"
# They always get SOME response
Graceful degradation examples:
Can’t generate full analysis? Return summary
Can’t use complex model? Use simple model
Can’t generate? Return cached response
Everything failing? Return polite error message
Pattern 5: Timeout Handling
Don’t let requests hang forever:
import signal
class TimeoutError(Exception):
pass
def timeout_handler(signum, frame):
raise TimeoutError("Request timed out")
def generate_with_timeout(prompt: str, timeout_seconds: int = 30):
"""Generate with timeout"""
# Set timeout
signal.signal(signal.SIGALRM, timeout_handler)
signal.alarm(timeout_seconds)
try:
result = llm.generate(prompt)
# Cancel timeout
signal.alarm(0)
return result
except TimeoutError:
print(f"? Request timed out after {timeout_seconds}s")
return "Request timed out. Please try a shorter prompt."
# Or using asyncio
import asyncio
async def generate_with_timeout_async(prompt: str, timeout_seconds: int = 30):
"""Generate with async timeout"""
try:
result = await asyncio.wait_for(
llm.generate_async(prompt),
timeout=timeout_seconds
)
return result
except asyncio.TimeoutError:
return "Request timed out. Please try a shorter prompt."
Why timeouts matter:
Prevent resource leaks
Free up GPU for other requests
Give users fast feedback
Combined Example
Here’s how I combine all patterns:
from fastapi import FastAPI, HTTPException
from circuitbreaker import CircuitBreaker, CircuitBreakerError
app = FastAPI()
# Initialize components
circuit_breaker = CircuitBreaker(failure_threshold=5, timeout=60)
rate_limiter = RateLimiter(max_requests=100, time_window=1.0)
cache = ResponseCache(ttl=3600)
@app.post("/generate")
@retry_with_backoff(max_retries=3)
async def generate(request: GenerateRequest):
"""
Generate with full error handling:
- Rate limiting
- Circuit breaker
- Retry with backoff
- Timeout
- Fallback strategies
- Caching
"""
# Rate limiting
if not rate_limiter.acquire():
raise HTTPException(status_code=429, detail="Rate limit exceeded")
# Check cache first
cached = cache.get(request.prompt)
if cached:
return {"text": cached, "cached": True}
try:
# Circuit breaker protection
result = circuit_breaker.call(
generate_with_timeout,
request.prompt,
timeout_seconds=30
)
# Cache successful response
cache.set(request.prompt, result)
return {"text": result, "status": "success"}
except CircuitBreakerError:
# Circuit breaker open - return fallback
return {
"text": "Service temporarily unavailable. Using cached response.",
"status": "degraded",
"fallback": True
}
except TimeoutError:
raise HTTPException(status_code=504, detail="Request timed out")
except Exception as e:
# Log error
logger.error(f"Generation failed: {e}")
# Return graceful error
return {
"text": "I apologize, but I'm unable to process your request.",
"status": "error",
"fallback": True
}
What this provides:
? Prevents overload (rate limiting)
? Fast failure (circuit breaker)
? Automatic recovery (retry)
? Resource protection (timeout)
? Graceful degradation (fallback)
? Performance (caching)
Deployment Recommendations
While my testing remained at POC level, these patterns prepare for production deployment:
Before deploying:
Load Testing
Test with expected peak load (10-100x normal traffic)
Measure P95 latency under load (<500ms target)
Verify error rate stays <1%
Confirm GPU memory stable (no leaks)
Production Deployment Checklist
Before going live, verify:
Infrastructure:
[ ] GPU drivers installed and working (nvidia-smi)
[ ] Alert destinations set (PagerDuty, Slack, email)
[ ] Langfuse set up (if using LLM observability)
Testing:
[ ] Health check returns 200 OK
[ ] Can generate completions via API
[ ] Metrics endpoint returning data
[ ] Error handling works (try invalid input)
[ ] Budget limits enforced (if configured)
[ ] Load test passed (see next section)
Security:
[ ] API authentication enabled
[ ] Rate limiting configured
[ ] HTTPS enforced (no HTTP)
[ ] CORS policies set
[ ] Input validation in place
[ ] Secrets not in git (use env variables)
Operations:
[ ] Backup strategy for logs
[ ] Model cache backed up
[ ] Runbook written (how to handle incidents)
[ ] On-call rotation defined
[ ] SLAs documented
[ ] Disaster recovery plan
Real-World Results
Testing on GCP L4 GPUs with 11 queries produced these validated results:
End-to-End Integration Test Results
Test configuration:
Model: Phi-2 (2.7B parameters)
Quantization: None (FP16 baseline)
Prefix caching: Enabled
Budget: $10/day
Hardware: GCP L4 GPU
Results:
Metric
Value
Total Requests
11
Success Rate
100% (11/11) ?
Total Tokens Generated
2,200
Total Cost
$0.000100
Average Latency
5,418ms
Cache Hit Rate
90.9% ?
Budget Utilization
0.001%
Model distribution:
Phi-2: 54.5% (6 requests)
Llama-3-8B: 27.3% (3 requests)
Mistral-7B: 18.2% (2 requests)
What this proves: ? Intelligent routing works (3 models selected correctly) ? Budget enforcement works (under budget, no overruns) ? Prefix caching works (91% hit rate = huge savings) ? Multi-model support works (distributed correctly) ? Observability works (all metrics collected)
Cost Comparison
Let me show you the exact cost calculations:
Per-request costs (from actual test):
Request 1 (uncached): $0.00002038
Requests 2-11 (cached): $0.00000414 average
Total: $0.00010031 for 11 requests
Average: $0.0000091 per request
Extrapolated monthly costs (10,000 requests/day):
Configuration
Daily Cost
Monthly Cost
Savings
Without caching
$0.91
$27.30
Baseline
With caching (91% hit rate)
$0.18
$5.46
80%
With quantization (AWQ)
$0.09
$2.73
90%
All optimizations
$0.09
$2.73
90%
Add in infrastructure costs:
GCP L4 GPU: $0.45/hour = $328/month
Total monthly cost:
- Infrastructure: $328
- API costs: $2.73
- Total: $330.73/month for 10,000 requests/day
Compare to OpenAI:
OpenAI GPT-4:
- Input: $0.03 per 1K tokens
- Output: $0.06 per 1K tokens
- Average request: 100 tokens in + 100 tokens out = $0.009
- 10,000 requests/day = $90/day = $2,700/month
Savings: $2,369/month (88% cheaper!)
After building and testing this platform, I understand why enterprise AI differs from giving developers ChatGPT access and why 95% of initiatives fail. Here is why these layers matter:
Cost tracking isn’t about being cheap—it’s about accountability. Finance won’t approve next year’s AI budget without ROI proof.
Intelligent routing prevents the death spiral: early excitement ? everyone uses the expensive model ? costs spiral ? finance pulls the plug ? initiative dies.
Observability builds trust. When executives ask “Is AI working?”, you need data: success rates, cost per department, quality trends. Without metrics, you get politics and cancellation.
Error handling and budgets are professional table stakes. Enterprises can’t have systems that randomly fail or spend unpredictably.
Here are things missing from the prototype:
Security: No SSO, PII detection, audit logs for compliance, encryption at rest, security review
High Availability: Single instance, no load balancer, no failover, no disaster recovery
Operations: No CI/CD, secrets management, log aggregation, incident playbooks
Scale: No auto-scaling, multi-region, or load testing beyond 100 concurrent
Governance: No approval workflows, per-user limits, content filtering, A/B testing
I have learned that vLLM works, open models are competitive, the tooling is mature. This POC proves that the patterns work and the savings are real. The 5% that succeed treat AI as infrastructure requiring proper tooling. The 95% that fail treat it as magic requiring only faith.
Try it yourself: All code at github.com/bhatti/vllm-tutorial. Clone it, test it, prove it works in your environment. Then build the business case for production investment.